Sensors & Feedback Devices

Feedback sensors are used to detect your mechanical device's output so that your control system can adjust based on external factors.
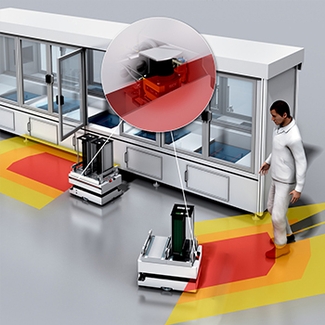
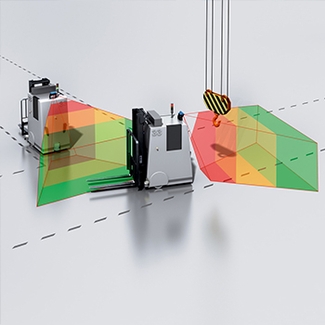
For example, mobile robots are able to move forward and backward thanks to wheels powered by a DC motor. Your control system determines how much power should be applied to the DC motor to make the wheels turn. However, the speed of the wheels is also affected by the load on the motor. In order for your robot to travel at a constant speed, it must have a feedback sensor that identifies how fast the robot is moving and adjusts the power accordingly.
There are several common feedback sensors that automation professionals use today. Take a look at each type of feedback sensor to learn when they should be used, and how they can help ensure your automation project is a success:
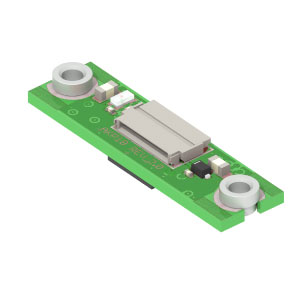
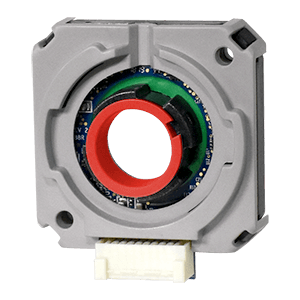
- Encoders, Resolvers & Tachometers
- Image Sensors
- Sensors
Show Per Page:
DISPLAY: