Automate 2023
3D Vision Technologies for Warehouse Robots
Stephen Se, Senior Engineering Manager, Teledyne FLIR - Machine Vision
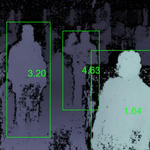
Depth perception is required by a number of warehouse robotic applications, including autonomous navigation, pick and place, palletizing, and package optimization. The most common methods to achieve depth perception are stereo, time-of-flight, and lidar. Choosing which method to apply depends on factors such as range, accuracy, ruggedness, cost, and weight. In this talk, we will compare the various 3D vision technologies and discuss their trade-offs pertaining to these applications. We will also provide instructions on how to build a compact and affordable embedded 3D vision system using off-the-shelf components and open-source software.
- It seems you are currently not logged in.
Log in now to confirm your membership level has access to content.
Non-Members can log in for limited access, but logged in members enjoy full access.
If you're not yet a member, click here to join or schedule a meeting with Julia Stevenson today!
*Assets marked for members only are subject to membership level eligibility.
- Platinum
- Gold
- Silver
- Bronze
- Non-Member
