Robotics Blog
How is Orientation in Space Represented with Euler Angles?
 If you use a six-axis robot, you most probably need to position its end-effector in various orientations. Of course, you can always jog your robot or hand-guide it, but this online programming method is tedious and imprecise. It is much more efficient to calculate your desired orientation offline.
If you use a six-axis robot, you most probably need to position its end-effector in various orientations. Of course, you can always jog your robot or hand-guide it, but this online programming method is tedious and imprecise. It is much more efficient to calculate your desired orientation offline.
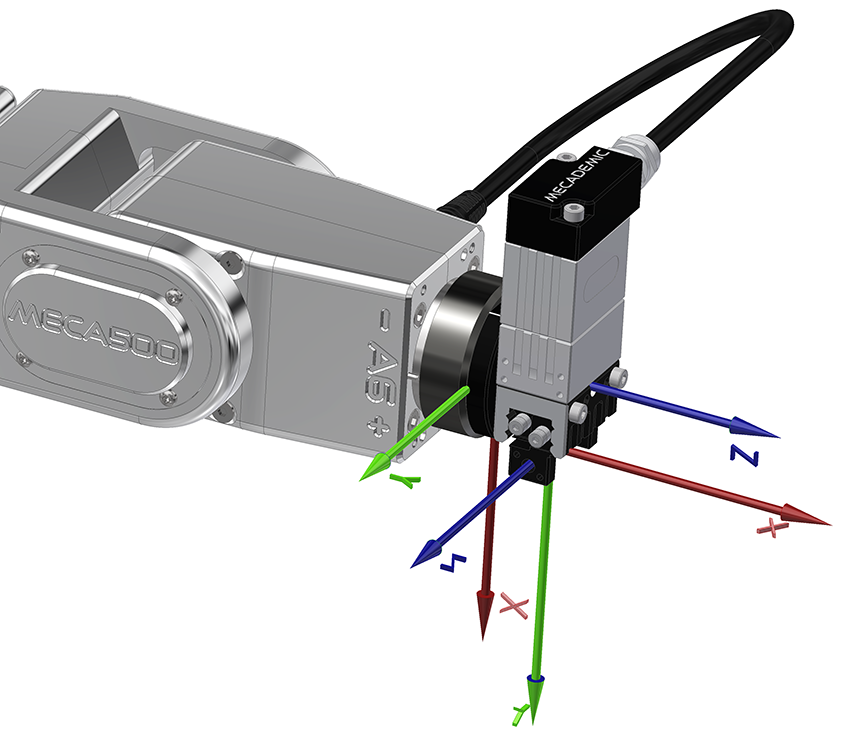
In robotics, a user defines an orientation with Euler angles. Unfortunately, not only various Euler angle conventions exist but also robot manufacturers use different ways to describe them. Furthermore, finding the Euler angles for a desired orientation is often quite difficult. This interactive tutorial prepared by Mecademic features an applet that visualizes the sequence of rotations that define Euler angles. The tutorial also describes in detail how Euler angles are calculated with the help of rotation matrices.
ROI Calculator

Discover the potential cost savings of robotic automation over a 20-year system life
This calculator compares your current manual labor costs against the total cost of owning and operating a robotic system over its 20-year lifespan.
Recent Posts
- Creating a Safety Culture in Your Organization at the International Robot Safety Conference
- 6 Companies Driving Automation in Mexico
- Humanoids on the Horizon: What Hurdles Remain for Widespread Adoption?
- Safety by Design: How Humanoid Robots Must Evolve to Depart the Walled Garden
- Are Robots Really Taking All the Manufacturing Jobs?
- The Shipping Industry Floats Emerging Opportunities for Maritime Automation
- View All Robotics Blogs