Industry Insights
Tutorial: Brushed DC Motors, Part II
A brushed DC motor requires understanding issues like speed/torque curves, back EMF, cogging, and winding design.
 In part one of this two-part article, we reviewed the basic theory of brushed DC motors. In part two, we discuss nuances of design and operation the users need to know in order to choose the right motor for their application.
In part one of this two-part article, we reviewed the basic theory of brushed DC motors. In part two, we discuss nuances of design and operation the users need to know in order to choose the right motor for their application.
Economical and simple, brushed DC motors deliver milliwatts to megawatts of output, making them a workhorse technology for applications as varied as portable infusion pumps and steel rolling mills. The synchronous devices exhibit a linearity that makes it easy to calculate the operating parameters for given motor under various conditions. For a constant input voltage, speed of a DC motor falls linearly as the load increases, for example, the current will increase as a function of load applied to the output shaft. We can use these relationships to determine the current required for a specific motor to drive a desired load.
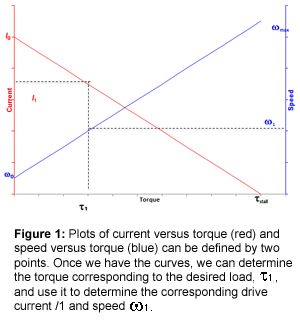
Because the relationships involved are linear, we need only two data points to derive each of our curves (see figure 1). We can produce a curve of speed as a function of torque by knowing the speed when the motor is unloaded (the no-load speed, wn) and the load required to stall the motor, corresponding to the maximum torque the motor can generate (the stall torque, ts). Similarly, we can plot the relationship between current and the load the motor can move at that current by knowing the no-load current In and the stall current Is. Once we know the load that we’re driving with our motor, we look for the current/speed that corresponds to the torque represented by our load.
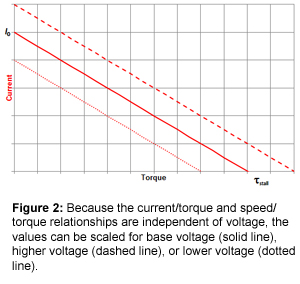
Because the speed/torque and current/torque relationships are linear and independent of applied voltage, modifying the curve for a different voltage is as simple as scaling the curve (see figure 2). Obviously, this is a simplified model that does not account for varying voltage and for loss mechanisms beyond just the wire coils, but it gives an idea of the advantages of DC motors.
 Back emf
Back emf
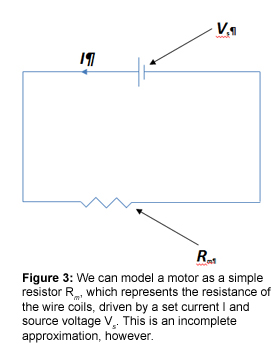
Given that a rotor basically consists of many coils of wire, we can model a DC motor as a simple circuit consisting of a battery and a resistor (see figure 3) as described by Ohm’s law:
Vs = IR [1]
where Vs equals supply voltage, I is current, and R is coil resistance.
For a constant voltage, the current draw of a motor is inversely proportional to the resistance, which we can approximate as the resistance of the wire in the coils - quite low. That means that especially in the low speed or locked rotor conditions a motor could draw enough current to burn out coils. Fortunately, there are other factors at work. The armature of the DC motor consists of coils moving through a magnetic field. As we discussed in part one, the magnetic field from the armature or exerts a force on the current carrying wires of the coil to generate torque. At the same time, the converse is also true – the wires moving through the magnetic field generate an electromotive force, or emf (?) of
 [2]
[2]
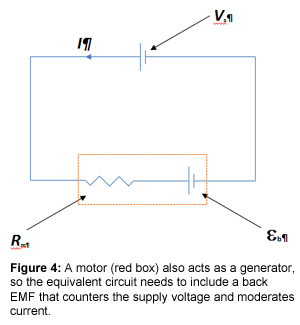
 In other words, every DC motor simultaneously acts as a generator. Per Lenz’s Law, the direction of the emf opposes that of Vs. This is represented by the minus sign in equation we represent with the minus sign. But we can represent magnetic flux through a loop as:
In other words, every DC motor simultaneously acts as a generator. Per Lenz’s Law, the direction of the emf opposes that of Vs. This is represented by the minus sign in equation we represent with the minus sign. But we can represent magnetic flux through a loop as:
 [3]
[3]
This means that for a tightly wound coil of N loops turning in a constant magnetic field B, the loop area A changes over time, so we can restate equation 2 as
 [4]
[4]
Moreover, Lenz’ Law says that the emf will actually oppose the applied voltage, and that back emf increases the speed of rotation of the coil. Now, our equivalent circuit includes another component (see figure 4)
 and equation 1 becomes
and equation 1 becomes
 [5]
[5]
Solving for current, we obtain
 [6]
[6]
In other words, the higher the back emf, the lower the current draw—and the lower the level of heat to be dissipated. Also, note that equation 4 tells us that the higher the speed of the motor, the greater the value of ?b, which again reduces current. Consider our no-load condition. Just after startup, the current spikes but the back emf immediately begins to increase, countering the source voltage. This makes the current draw drop. By the time the motor reaches maximum speed, the back emf almost balances source voltage and the result is the motor operating no-load draws very little current. Once we apply a load, speed and back emf drop, allowing the current to increase and the motor to produce useful power.
This relationship allows back emf to be used as a tool to monitor speed or verify motor operation.
Cogging
The most common design for a brushed DC motor is iron core, in which the rotor consists of a laminated iron core wound with wire to create the coils. Iron-core brushed DC motors are robust and capable of producing large amounts of torque, but they do suffer from a phenomenon known as cogging, which can introduce a step-like motion to the rotation of the motor. Cogging is caused by attraction between the iron teeth of the rotor and the magnets of the stator, and is present even when the motor is powered down. As the teeth of the armature pass over the edges of the stator magnets, the attraction between the two perturbs the rotation. In the case of a high-torque or high-inertia application, cogging does not present much of a problem. In the case of a motion control application, it can introduce positioning error large enough to compromise the task at hand.
One way to reduce cogging is to skew the teeth, essentially twisting the armature so that the teeth are angled with respect to the edges of the magnets (see figure 3). This smooths the effect. There are tradeoffs, of course. Skewing the armature reduces torque. “You sacrifice maybe 3% of your torque to get a smooth position operation,” says Dan Jones, president of Incremotion Inc. (Thousand Oaks, California). “In many cases that’s a good trade-off but you increase your cost because now you have to wind on a skewed, twisted stack. It costs a little more to set up the tooling and do the winding.”
Another way to avoid cogging is to go with a coreless design. The rotors of coreless motors consist of skew-wound wire with no core. They offer lower inertia and inductance, as well as zero cogging. On the downside, the lack of a core means they are less effective at transferring heat so can be overheated. Coreless motors tend to be good fits for high-performance, high-precision applications such as medical devices, industrial automation systems, and military/aerospace systems.
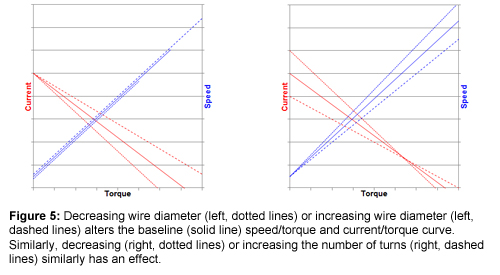
Winding design
Windings represent a key degree of freedom in motor design. Recall that coil resistance directly affects current draw and speed. A motor might have the same physical dimensions and weight, but by varying the diameter of the wire and the number of turns in the coil, the designer can obtain very different performance (see figure 5). On one end of the spectrum, low resistance windings consist of thicker wire with fewer turns. Low resistance windings lead to higher starting currents and higher operating speeds. On the other end, high resistance windings feature thinner wires with more turns, which yield lower starting currents and lower operating speeds.
The best choice winding depends on the application. A battery-powered medical device, for example, would probably have severe constraints on current draw and be a better fit for high-resistance windings. For an application running off a power supply and wall-plug power, current is not the issue but motor size or noise could be a greater concern, so the device would be better off with low-resistance windings.
Choosing the right brush
Brushes play an essential role in the operation of a brushed DC motor, commutating the drive voltage to keep the motor turning. Different brush materials deliver different levels of performance—the application defines the proper choice. Although the most common brush material is carbon, they can also be made of precious metals such as gold, silver, or platinum, as well as alloys like copper graphite or silver graphite. “You could have a perfect motor design and if you choose the wrong brush you’re in trouble in minutes—the brushes wear out completely,” says Jones. “You can have a normal current going into a motor with the wrong brush materials and it will mechanically wear the brushes out in hours.”
|
Things to know before you To specify the right motor for your system, you need to know a number of characteristics of your application, including: Load/speed requirements |
Graphite provides a robust solution, especially for motors 15-mm diameter and larger. Graphite brushes tend to produce debris over time, which can get into the commutator, triggering intermittent failures. In general, motors using graphite brushes should run at high enough speed (above 1,000 rpm) to cast the debris away and over long duty cycles to burn off the debris. “As long as you keep the debris out of the commutator the graphite brushes tend to be more robust and offer better reliability,” says Paul McGrath, sales engineer at Maxon Precision Motors (Fall River, Massachusetts).
Precious metal brushes tend to be fingered, so they are not quite as robust as solid graphite brushes. They produce less electrical noise and also less audible noise, making them a good fit for sensitive applications. They take up less space than carbon-graphite brushes, making them a good fit for small motors (less than 15 mm diameter) as well as lower power, low-duty-cycle applications.
The voltage drop between commutator and brush tends to be small for precious metal brushes, making the motors compatible with low-voltage systems. Precious brushes do not have the self-lubricating characteristics of graphite brushes, causing greater wear over time. As a result, a commutator lubricant is typically added.
There are additional aspects of an application that might affect brush design. Brushes can handle only limited current density; past a certain point they may begin to burn up. Speed presents a mechanical challenge – the brush could actually fly off the commutator. Motors designed for high-altitude operation require special brushes that can tolerate or compensate for the low humidity environment, such as brushes doped with molybdenum disulfide or lithium carbonate.
Imperfections in the commutator can also cause problems. When the brushes run over the gaps between the two halves of the commutator, the energy stored in the motor winding as a magnetic field causes an arc between the brush and commutator segment. This occurs not only during normal commutation, but also in situations in which the brushes “bounce” on the rotating commutator. At higher speeds, this results in faster brush wear and electro-erosion.
Mistakes to avoid
Specifying the right motor begins with understanding the objectives. A positioning application may require a very specific speed-torque profile, for example, while a speed application may focus more on achieving a specified output power. Load, for example, is a key parameter. Environmental conditions are also important. Users need to be aware of the nuances of how temperature affects the performance and also how the grease or oil in bearings react at cold temperatures or being at high temperature for long periods of time. Armed with this information, they can make trade-offs or modify the design to fine-tune performance. “Generally, it gets back to the load because if you tell me the load then we can calculate whether my motor’s capable of providing that load under most likely your worst case conditions,” says Mike Eckert, motor application engineer at NMB Technologies Corp. “If we don’t have one available, then we can make adjustments to the winding by changing the number of turns or changing gauge of the magnet wire. We can also adjust many physical parts of the motor (magnet length or type of magnet) armature length. All of these allow motor manufactures to customize a motor to meet our customer’s objectives.
Users need to be realistic in terms of expectations. It might seem obvious, but even the most finely tuned motor can only generate a certain amount of speed and torque for a given voltage and current. Although users often overdrive motors to achieve desired performance that can compromise lifetime and, potentially, accuracy.
It’s important to remember that once a motor has an added gearhead, the top speed listed on the specification sheet no longer applies. “As soon as you add a gearbox to the motor, you really want to run the gearmotor at lower speeds than the motor’s actually rated to run on its own,” says McGrath. “Customers will say oh, all right, if I run this motor at the nominal voltage or higher than the nominal voltage, I can get this speed out that is okay for the motor by itself but really is a lot faster going into the gear head than we like to see.”
Inertia versus positioning accuracy represents another trade-off. A larger rotor can produce more torque, but the inertia of the rotor goes as the fourth power of diameter, which can decrease positioning accuracy. “If I’m trying to move fast, I’m going to lose as I make the rotor larger and larger,” says Jones. “I might have to use a thicker wire with lower resistance or maybe change the shape of the rotor. Say I can’t use the barrel shape. Maybe I can get around it by going with a large disk, but then inertia will ultimately limit me. I could go with a transverse-flux motor, which has the highest torque per weight of any motor out there, but the problem is that it does not go fast – generally under 1000 rpm.”
Properly specifying a motor is a nuanced process—the discussion here is intended only as a starting point, and is based on a number of approximations. Users should work with their manufacturer to arrive at the correct solution. By taking advantage of a variety of design options such as customized windings, brush materials, etc., they may very well be able to obtain exactly the performance they seek.
Acknowledgments
George Hunt, application engineer at MICROMO (Clearwater, Florida) provided background information for this article.
Motion Control & Motor Association
The Motion Control and Motor Association (MCMA) – the most trusted resource for motion control information, education, and events – has transformed into the Association for Advancing Automation.
Discover how Motion Control & Motor Association can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteMotion Control & Motor Association 
The Motion Control and Motor Association (MCMA) – the most trusted resource for motion control information, education, and events – has transformed into the Association for Advancing Automation.
Stäubli to Unveil Revolutionary Workflow for Injection Molding at NPE Show
Stäubli will showcase a unique range of integrated solutions designed to improve efficiency and quality for injection molding.
Weyerhaeuser’s Flexo Printing Facilities Streamline Pre-Press by Switching to New High-Tech Plate Mounting
Challenged with shorter lead times, smaller order quantity and tighter registration, forest products giant, Weyerhaeuser, increased pre-press production by 100