Industry Insights
Understanding Optical Encoders (Part II of II)
Non-optical encoder options like magnetic, inductive, and eddy-current designs offer moderately high resolutions and tolerate punishing environmental conditions.
Part one of this two-part article discussed the various types of optical encoders. In part two, we review magnetic, inductive, and capacitive encoders.
") The industrial environment is a dirty business. Components have to survive dust generated by wood and paper processing, metal fragments scattered by machine tools, caustic chemicals from daily washdown, oil from hydraulic cylinders, or a mixture of the above. There’s more, of course: humidity, constant vibration, and multi-g shock loads, to name just a few. Industrial environments are as tough as it gets.
The industrial environment is a dirty business. Components have to survive dust generated by wood and paper processing, metal fragments scattered by machine tools, caustic chemicals from daily washdown, oil from hydraulic cylinders, or a mixture of the above. There’s more, of course: humidity, constant vibration, and multi-g shock loads, to name just a few. Industrial environments are as tough as it gets.
Optical encoders deliver top resolution for applications that demand the best performance. For tough industrial applications that don’t require the resolution of an optical encoder, though, engineers have several alternatives, including magnetic, inductive, and capacitive encoders. Let’s take a closer look.
The basics of magnetic encoders
A magnetic encoder operates analogously to an optical encoder. Instead of a code disk modulating an optical beam, a magnetic encoder uses a ferrous structure to perturb the magnetic field. Linear versions use a code strip instead of a disk. Like their optical counterparts, magnetic encoders are available in incremental and absolute types. We’ll start with the incremental approach.
A very basic version consists of a stationary magnetic detector and a ferrous metal gear attached to the shaft of the motor (see figure 1). As the shaft and gear turn, the teeth pass by the detector. Variations in the magnetic field generate a series of voltage pulses; as with an optical encoder, the electronics convert that signal into speed or position data.
 or a strip (bottom) that features alternating magnetic fields about the circumference. (Courtesy of Dynapar)")
Although this is a good, simple approach, it depends on the ability to accurately machine narrow slots into a disk of metal. Practically speaking, machining capabilities and issues of mechanical strength limit resolution to about 120 PPR (pulses per revolution). Achieving higher resolutions not only requires precision tooling, but very tight air gaps between detector and disk, which complicates installation and makes the sensor more sensitive to misalignment.
A magnetic encoder can also be implemented using a rotating drum patterned with alternating north and south poles (see figure 2). The drums are typically injection molded from nylon or polycarbonate doped with an isotropic magnetic material; resolution is determined by the spacing of the domains recorded in the magnetic material. The drum design tends to be insensitive to the end play of the motor shaft, making it less vulnerable to installation and alignment errors.
So far, the examples we’ve discussed have involved incremental magnetic encoders, which track position or speed based on the displacement from some home position. For many applications, rehoming at startup or after a power failure is not a problem. In other cases such as elevators, losing track of absolute position could have catastrophic consequences. Those require absolute encoders.
In an absolute magnetic encoder, the position and spacing of the north and south poles vary to create a unique identifier for each angular or linear position. The magnetic absolute encoder typically includes both an absolute code disk/strip, to identify the spatial location and a parallel incremental disk/strip, to perform the function of a clock signal.
Magnetic detectors
The code disk/strip is only part of the device. The detector technology also has an extremely important effect on performance. The most basic version is the variable-reluctance detector, or magnetic pickup. This consists of an iron core wrapped with wire. A varying magnetic field such as that introduced by the code wheel or strip generates a voltage change; that signal can be processed to generate output. Variable-reluctance detectors can tolerate heavy vibration as well as high temperatures. On the downside, the output current is proportional to the speed of the load. As a result, their performance is a function of the readout circuitry, so they can be designed for high-speed operation or low-speed operation, but typically not both. In general, they work best at rates of 180 inches per second or more.
For higher speeds, a magnetoresistive detector may be a better choice. As the name suggests, magnetoresistive detectors are based on the fact that resistance in a wire drops under exposure to an external magnetic field. The detectors consist of an array of lithographically patterned resistors fabricated from a magnetically sensitive alloy like nickel iron (NiFe). As the magnetic poles of the code wheel or strip pass by the array, the resistance generated in the detector circuit varies. This signal can be processed to yield speed and position data.
Magnetoresistive encoders deliver very good sensitivities and higher resolutions than variable-reluctance detectors. Properly designed, magnetoresistive encoders permit wider air gaps than alternative technologies. Because they’re solid-state devices, they are robust and benefit from the economies of batch processing. They’re not the ideal solution for all occasions, however. They’re etched from NiFe on glass, but aren’t actually compatible with CMOS (complementary metal-oxide semiconductor) processing. Plus, they’re larger than chip-level detectors.
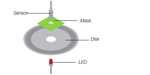
Based on the Lorentz force, a Hall-effect sensor is a solid-state detector that consists of a layer of p-type material. The Hall-effect sensor provides an alternative to magnetoresistive encoders. In the presence of an external magnetic field such as that produced by the code disk, the charge carriers in the semiconductor material separate, creating a potential difference. As the disk with its pattern of alternating domains turns, it generates a series of voltage spikes, creating a signal that can be analyzed to produce encoder output.
Hall-effect encoders offer a number of advantages. Produced using semiconductor fabrication techniques, they can be integrated with the readout circuitry to yield a compact, robust package that can be encapsulated to protect it. They’re particularly useful when fabricated in arrays that average readings over multiple pixels (see figure 3).
")
Magnetic encoders are noncontact and quite robust. They’re very tolerant of shock, vibration, misalignment, and most forms of contamination (see figure 4). Their performance is also stable over time, unlike the LEDs of optical encoders, which degrade with time and heat. They can also handle a broad range of operating temperatures.
On the downside, they tend to be more expensive than optical designs. Without extensive shielding, they’re not effective in high-magnetic-field applications like MRI machines. They also have lower peak resolutions, typically maximizing at 2048 PPR. Although that is nowhere near what optical encoders can deliver, for many industrial applications like web processing, it’s quite sufficient.
Inductive encoders
Resolvers, which are essentially specialized transformers, monitor absolute angular position based on inductive coupling between coils on the motor shaft and the sensor. As the shaft turns, the voltages in the two coils change. Applying simple trigonometry to the ratio of the two gives the angle.
Theoretically, resolvers boast infinite resolution, although because the data needs to be digitized, they are limited by the resolution of the analog-to-digital converter. Because they do not have onboard electronics, resolvers can handle extreme environments, including scorching temperatures and high radiation. They can also survive shock loads as high as 200 g. The readout electronics have to go somewhere in the system, however, which makes integration more complex. Although the resolvers themselves are fairly economical, the cost of the electronics adds up quickly.
More recently, manufacturers have developed inductive encoders, which operate on similar principles. They deliver the same performance and ruggedness as resolvers but from a device implemented as an integrated circuit. Instead of using discrete physical coils, they incorporate flat inductors fabricated on chip, along with readout electronics.
Implementations vary but the basic inductive encoder consists of a transmit coil and one or more receiving coils, both on the same PCB, as well as a separate conductive disk attached to the motor shaft. Energizing the transmit coil generates a magnetic flux that induces a current in the receiving coils. As the motor shaft turns, the disk passes over one of the receiving coils, modulating the output current. An on-chip ASIC (application-specific integrated circuit) processes the signal to yield position or velocity data.
Inductive encoders are both more robust than magnetic and optical encoders, and easier to use than resolvers. The correct choice of material for the disk is essential, however. Soft iron code discs exhibit a temperature dependence, while extreme external magnetic fields can modify the permeability of the material and skew the results. Ferrous or ferrite inductive encoders can work well in magnetic fields, at least to a point. Past a certain level, they, too have trouble.")
One solution is the eddy-current inductive encoder, which is based on an ironless design. When a high-frequency field is applied to a highly conductive metal, it generates an eddy current, which is restricted to the surface. This effect means that the device can function without being large in size. Instead of the induction encoder needing a macro-sized code disk, the eddy currents can be generated in a layer of copper just 100 µm thick. This produces devices compact enough to be integrated into pancake-style motors (see figure 5).
Capacitive encoders
The final encoder technology is based on capacitive sensing. In a capacitive encoder, a disk that turns with the motor shaft introduces a variation in capacitance, which is measured by exciting planar electrodes with a high-frequency signal. One common form consists of a pair of plates (the “rotor” and “stator”) placed in close proximity. The rotor is patterned with a dielectric layer in a circle with a sinusoidal pattern around the edge, while the stator, which carries the sensor electronics, remains stationary. The sinusoidal pattern on the rotor disk introduces variations in capacitance as the shaft turns. An alternative design involves a sinusoidally patterned rotor disk sandwiched between two fixed disks (receiver and transmitter), and operates analogously.
Capacitive sensors can generate high-resolution output limited only by the ability to pattern variations on the edge of the rotor disk. They’re robust to shock and vibration and can handle high temperatures without a problem. Because the sensor operates across the entire surface of the disk rather than at a single point, the devices are very tolerant of mechanical air and misalignment. They’re also easy to manufacture in volume. On the downside, their update rate can be slow for some systems.
Whether your application needs resolution, speed, robustness, economy, or some combination of the above, encoder technology provides the solution to fit. Collect the details of your application and your design and be sure to work closely with your vendor to ensure that you’re making the choice that will deliver a lasting solution and will perform as needed.
---
Acknowledgments
Thanks go to Jeff Ireland and Mark Langille of Dynapar Corp., Volker Schwarz of Maxon Motor, and Don Labriola of Quicksilver Controls for helpful background information.
Related articles
Understanding Optical Encoders (Part I of II)
Resolvers Track Motion in Harsh Environments
Motion Control & Motor Association
The Motion Control and Motor Association (MCMA) – the most trusted resource for motion control information, education, and events – has transformed into the Association for Advancing Automation.
Discover how Motion Control & Motor Association can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteMotion Control & Motor Association 
The Motion Control and Motor Association (MCMA) – the most trusted resource for motion control information, education, and events – has transformed into the Association for Advancing Automation.
Understanding Optical Encoders (Part I of II)
Optical or magnetic? Inductive or eddy current? Incremental or absolute? Learn what encoder to choose for your application.

US Digital Announces New 16mm Optical Encoder
US Digital in September announced a new small encoder would make a big addition to its product offering.