Editorials
What’s the Best Reach for an Industrial Robot?
A robot’s “reach” will determine many other factors, e.g.: your workpiece size, the need for external axes, and more. But what’s the best reach for you?
Let’s say that you’ve got a task you want to automate. You know that you want to use an industrial robot but you’re not sure which brand or model is the best for you. How do you choose between the many different models on the market?
We have a directory of hundreds of robot models from dozens of brands. We often need to select an appropriate model for client projects or just for making a tutorial.
How do we select between all the different robots?
One of the first properties we’ll look at when choosing a robot is its “reach.” This fundamental robot property affects almost every other aspect of the application design.
For example, the robot’s reach will determine:
- How big your workpiece can be.
- Whether or not you need to use an external axis.
- Where you can position the robot on your workfloor.
- And all the other decisions after these…
But, what is a robot’s reach and how do you determine the best one? Let’s find out.
What is a Robot’s Reach?
As the name suggests, the robot’s “reach” is a measure of how far the robotic arm can reach when it’s completely outstretched. In other words, it defines the limits of the robot’s workspace.
It’s important to note that the reach is only a rough measure of the robot’s workspace. It is very common for a robot to have more reach in one direction than another, which isn’t reflected in the parameter. However, the reach does give us a general idea of the size of the robot and its kinematic capabilities. This is why it is a useful first parameter to use when picking a robot model.
The reach is determined by various physical factors about the robot, including:
- The length of its links.
- The overall size of the robot.
- The range of the joints (joints with low movement range can have low reach even if the robot is large).
Which Robots Have the Biggest and Smallest Reach?
If you are going to pick a reach value that suits the needs of your task, you first need to know the upper and lower limits.
In the past, there was a reasonably small variation between the sizes of industrial robots. These days, however, there is a massive range. You can now find robots that are so small they can fit on the palm of your hand and robots so big that they can lift up a 1.5-ton car. Hundreds of robot models are in our Robot Library for use with RoboDK.
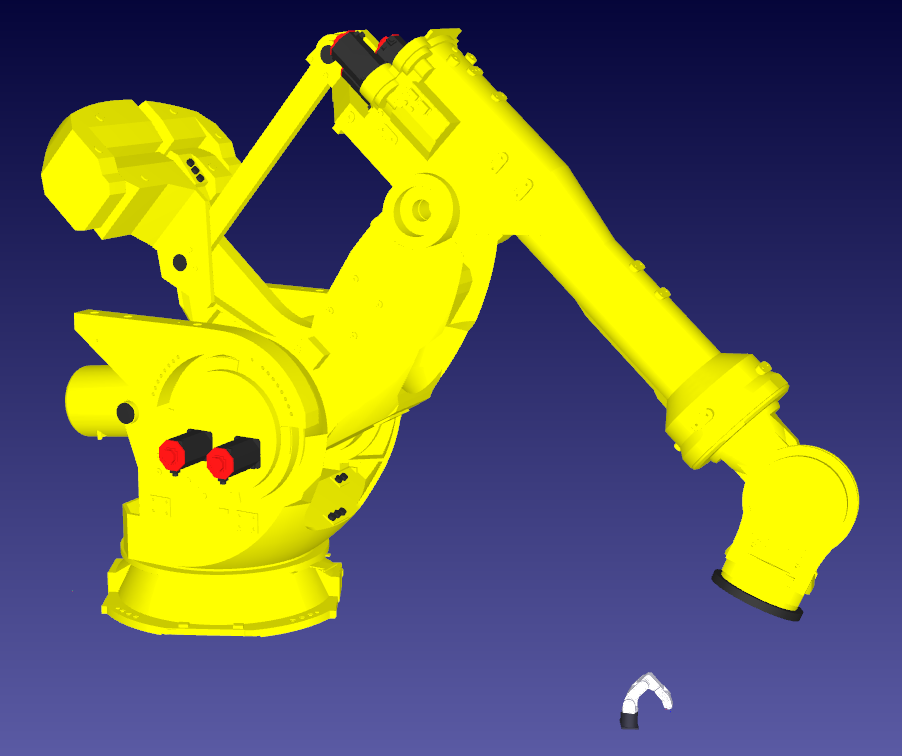
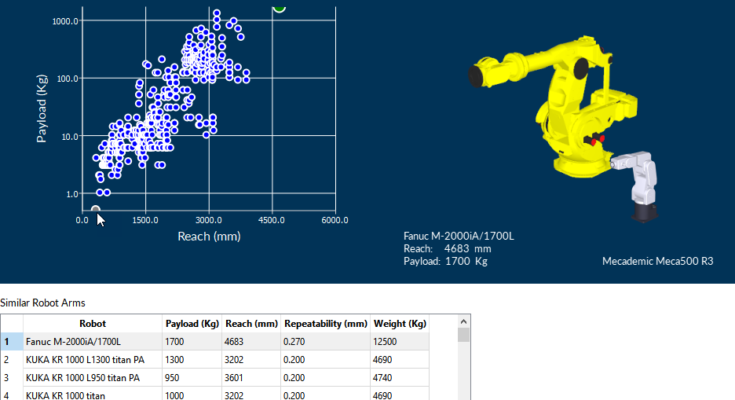
Biggest Reach: Fanuc M-2000iA/1700L
The largest robot (at the time of writing) in our Library is the giant M-2000iA from Fanuc.
Its properties are:
- Reach: 4683 mm
- Payload: 1700 kg
- Weight: 12500 kg
- Repeatability: 0.270 mm
At over 4 meters and 12 tons, this robot at the largest end of the scale is best suited to huge tasks involving very heavy, large payloads.
ROI Calculator

Discover the potential cost savings of robotic automation over a 20-year system life
This calculator compares your current manual labor costs against the total cost of owning and operating a robotic system over its 20-year lifespan.
Smallest Reach: Mecademic Meca 500 R3
The smallest robot (at the time of writing) in our Library is the tiny Meca 500 from Mecademic.
Its properties are:
- Reach: 330 mm
- Payload: 0.5 kg
- Weight: 4.5 kg
- Repeatability: 0.005 mm
At the smallest end of the scale, with a reach of only a few hundred millimeters, this tiny robot is targeted at desktop applications. This small size also allows it to be very precise — it has the lowest repeatability value for a 6 DoF robot at the time of writing.
Check Out Our Industrial Robot Reach Tool
We have an interactive tool that shows “Industrial Robot Arms by Reach.” With it, you can quickly jump to the reach that is most suitable for your task from a selection of all the robots in our library.
5 Steps for Picking the Best Reach for Your Task
With all the many options for robot models, what’s the best way to decide which reach is most suitable for your task?
Here is a 5-step selection process that you can use:
1. Determine the Task Needs
First, look at the task that you want to automate and clearly outline what is required to carry it out.
Decide the layout of the robotic cell and work out which route your products will take through it. From this information, you can then start to get an idea about the properties that are required to achieve the task with a robot, including its required reach.
2. Pick the Important Specifications
Not all robot specifications will be important for your task. For example, pick-and-place tasks generally don’t require high precision so the robot’s repeatability is not so important. If space is limited or workpieces are large, the size of the robot (reflected in its reach) will be vital.
3. Look for a Suitable Robot
Determine rough values for the robot’s key specifications as needed for the task (i.e. reach, payload, weight, and repeatability) and list them in order of importance. Then, pick a robot with the required reach by using our Reach Tool.
Remember, the reach required for your task is not going to be exactly the same as the robot’s reach. It’s almost always a good strategy to have a robot with more reach than you need because many robots are less dextrous at the edges of their workspace.
4. Find Similar Robots
When you have found a suitable robot, look at robots with similar specifications.
There are two ways you can do this:
- Use our interactive Robot Comparison Chart to compare different properties.
- Use the filters in our Robot Library to find robots with similar properties.
5. Compare and Decide
You will probably end up with a few robots which are suitable for your task. A good way to compare them is to try them out inside RoboDK.
Build a virtual mock-up of your task and test a few different robots. You should soon start to get a feel for which robot suits the needs of your task the best.
RoboDK
RoboDK is a powerful and cost-effective simulator for industrial robots and robot programming. Simulate over 1400 robot arms from 80 different robot manufacturers! No programming skills are required with the intuitive RoboDK graphical interface. Learn more https://robodk.com/
Discover how RoboDK can support your automation journey with their complete range of solutions and expertise.
Visit Company Website
RoboDK is a powerful and cost-effective simulator for industrial robots and robot programming. Simulate over 1400 robot arms from 80 different robot manufacturers! No programming skills are required with the intuitive RoboDK graphical interface. Learn more https://robodk.com/
RoboFill 4.0 – Robot- and gripper-assisted filling concept for customized bottle supply
Trending toward customization
Fully automated calibration cell with bin picking
ROMI Automation s.r.o. developed a fully automated and universal calibration line for the production of a wide range of products with different dimensions and weights. It allows fast product changeover and nonstop running without an operator’s supervision.
3D Vision-Guided Steel Plate Picking and Bending
Mech-Mind Robotics 3D Vision-Guided Steel Plate Picking and Bending