Technosoft Motion Technology Product
Member Since 2019
At TECHNOSOFT, we develop and manufacture intelligent motion control solutions that bring precision, performance, and flexibility to a wide range of applications. Our products combine motion controllers, drives, and support for multiple motor types – including brushless, DC brushed, stepper.
Product filed under:
Controls Controls
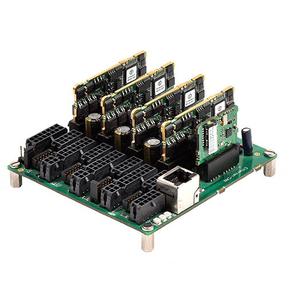
- Compact (100.3 x 98 x 37 mm), ready-to-run solution for up to 4 axes.
- Supply: motor/power: +9 to +36 Vdc; logic: +7 to +36 Vdc
- Output current:
- with iPOS3604: 4 A continuous (BLDC mode), 10 A peak current per axis
- with iPOS3602: 2 A continuous (BLDC mode), 3.2 A peak current per axis
- Communication: CAN-bus up to 1 Mb/s, RS-232 up to 115 k, and Ethernet 100 Mb/s
- CAN-bus protocols: CANopen (CiA301 v4.2, DSP305 v2.2, DSP402 v3.0) or Technosoft’s TMLCAN, selectable through a jumper
- Delivery options: from one to four iPOS3602 VX or iPOS3604 VX Intelligent Servo Drives, each offering:
- High-performance control of rotary or linear brushless, DC brushed or step motors
- Sinusoidal (FOC) or trapezoidal (Hall-based) control of brushless motors
- Open-loop (up to 512 microsteps/step) or closed-loop control of 2-phase and
- 3-phase steppers
- Torque, speed or position control
- Feedback options: incremental single-ended or RS-422 differential encoders, 1 Vpp sine/cosine encoders, digital or linear Hall sensors
- Various modes of operation: position or speed profiles (trapezoidal or S-curve), interpolated (PT and PVT), external (pulse & direction, analogue), electronic gearing or camming (with master position sent via CANbus)
- Powerful TML instruction set for definition / execution of motion sequences (TMLCAN protocol)
- Standalone operation with stored motion sequences (TMLCAN protocol)
- 5 digital inputs, 5-36 V (compatible with NPN outputs): Enable, 2 limit switches and 2 general-purpose ones
- 3 digital outputs, 5-36 V, 0.2 A: Ready, Error, 1 general-purpose
- 2 analog inputs, 12-bit, 0-5 V: Reference, Feedback or general-purpose
- Feedback devices supported:
- Incremental quad encoder (single-ended, open collector and differential)
- Analog sine/cosine incremental encoder (differential 1 Vpp)
- Digital and linear Hall sensors
- Easy configuration and programming with EasyMotion Studio software platform
- Protection to over-current, short-circuit, earth fault, over- / under-voltage, I2t, control error

