Roboception GmbH Product
Eyes and brains for your robot: With its innovative hardware and software products, Roboception GmbH, based in Munich, is a pioneer in 3D sensor technology. Our 3D stereo sensor rc_visard enables robotic systems to reliably perceive their environment in real time; the complementary rc_reason software suite offers application-specific modules to add on as needed for your individual tasks. Intuitive user interfaces make the implementation as easy as can be: Users, even without any prior robot vision experience, will be able to deliver task-relevant information such as grasp points with just a few mouse clicks. We combine both classical and AI-based methods to give the robots eyes – and hence deliver key elements of our customer’s most forward-looking automation solutions in domains like logistics, automation and beyond.
Product filed under:
Software & AI Software & AI
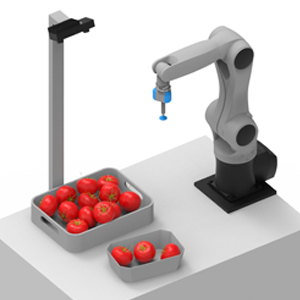
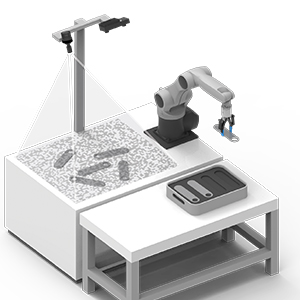
The rc_reason ItemPick Module is a solution for robotic pick-and-place applications using suction grippers: It computes surface grasp poses for a suction device on a given object. This software component can be easily activated on-board of Roboception’s rc_visard Stereo Sensor or rc_cube IPC, and operated through standard interface: Equipped with the ItemPick Module, the rc_visard computes a configurable number of grasp poses for a suction device on all items identified inside a pre-defined workspace.
-
Initial identification of load carrier for bin-picking
-
Reliable detection of flat surface(s) on items
-
Works with static and robot-mounted sensors
-
On-board data processing: No external hardware required
-
Out-of-the-box: Easy installation and operation
A grasp order is proposed (and can easily be modified by the operator), and each suggested grasp includes a quality value related to the surface available for grasping. As the size of the selected suction device can be specified individually, ItemPick is useable with any common suction device. Further, it works on any kind of object. Workspace definition is performed either automatically (by detecting e.g. a bin), or manually (by defining an area of interest). Using the sensor’s on-board hand-eye calibration component (to avoid addition transformation steps between sensor and robot) is an additional option. Java example programs ease integration with robot controllers. ItemPick applications can be optimized by equipping the rc_visard with a projector and corresponding IO Control Module. This enhancement is recommended in particular for difficult objects or workspaces.
Other Products from Roboception GmbH

rc_viscore 3D Stereo Sensor
The rc_viscore is a high-resolution IP54-protected 3D stereo sensor with an integrated pattern projector.