Roboception GmbH Product
Eyes and brains for your robot: With its innovative hardware and software products, Roboception GmbH, based in Munich, is a pioneer in 3D sensor technology. Our 3D stereo sensor rc_visard enables robotic systems to reliably perceive their environment in real time; the complementary rc_reason software suite offers application-specific modules to add on as needed for your individual tasks. Intuitive user interfaces make the implementation as easy as can be: Users, even without any prior robot vision experience, will be able to deliver task-relevant information such as grasp points with just a few mouse clicks. We combine both classical and AI-based methods to give the robots eyes – and hence deliver key elements of our customer’s most forward-looking automation solutions in domains like logistics, automation and beyond.
Product filed under:
Software & AI Software & AI
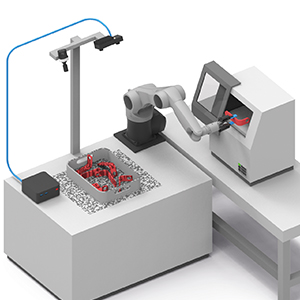
Relying on an object‘s CAD data, the rc_reason CADMatch Module enables a robotic system to reliably detect, localize and pick said objects from unmixed load carriers, fully independent of the object‘s position and orientation. This application can significantly increase the efficiency of production processes, e.g. by automating machine tending.
-
Detection and localization of objects based on CAD data
-
Delivers grasp point(s) for reliable pick-and-place
-
Template creation provided as a service
-
Increases efficiency of automation processes
-
Suitable for use with any rc_visard (monochrome, color)
With the rc_reason CADMatch module, robotic systems are enabled to reliably detect, localize and pick unmixed objects e.g. from bins or cages, fully independent of the object‘s position/ orientation, based on a previously taught CAD model. The software allows the specification of one or more grasp points per object, hence enabling picking by a two-finger gripper or a suction device. This module runs off-board the rc_visard on an rc_cube computer (not included) and is operated through an intuitive WebGUI interface that includes a grasp-teaching interface. The CADMatch Module requires a template of the object to be detected. This serves as input to an AppliedAI-based part training process. The creation of this template from the object‘s CAD data is available as a service through Roboception; the first two templates are included with the software purchase.
Other Products from Roboception GmbH

rc_visard NG Vision Platform
The flexible vision platform rc_visard NG opens up new possibilities for robotics integrators and end users to take full advantage

rc_viscore 3D Stereo Sensor
The rc_viscore is a high-resolution IP54-protected 3D stereo sensor with an integrated pattern projector.