Case Studies
Robotic picking of croissants
Partner:
IMR – Irish Manufacturing Research
Problem:
Bin picking of randomly oriented parts is of great interest to manufacturers as automation of these processes can save a lot of costs and space. The market offers a large number of bin picking solutions but many of them struggle with recognizing and identifying transparent, deformable, variable, and reflective objects that may even be piled, entangled, and jumbled up.
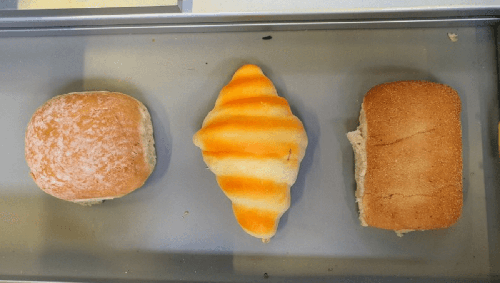
The Irish Manufacturing Research built a bin picking cell for the picking of 3 different types of randomly oriented bread products.
This project presented several technical challenges:
- Identification and picking of objects of non-symmetrical and complex shapes
- Random orientation of the objects
- Picking of 3 different types of objects
- Achieving optimal process speed
Solution:
Bin Picking Studio + PhoXi 3D Scanner
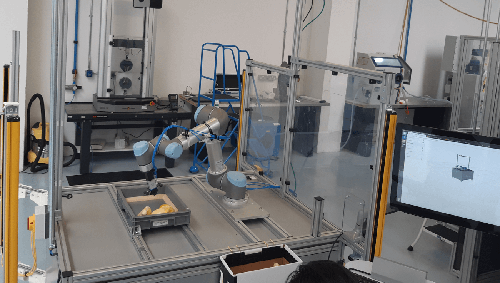
The solution comprises a bin picking cell with Photoneo robotic intelligence software for bin picking – the Bin Picking Studio, a PhoXi 3D Scanner, and a UR 5 robot. The supplier of Photoneo technology in the UK is Multipix Imaging.
Before implementation, the following setup and configuration requirements needed to be met:
Pre-planning:
Certified System Integrator Program
Set Yourself at the Forefront of the Global Vision Market
.jpg) Vision system integrators certified by A3 are acknowledged globally throughout the industry as an elite group of accomplished, highly skilled and trusted professionals. You’ll be able to leverage your certification to enhance your competitiveness and expand your opportunities.
Vision system integrators certified by A3 are acknowledged globally throughout the industry as an elite group of accomplished, highly skilled and trusted professionals. You’ll be able to leverage your certification to enhance your competitiveness and expand your opportunities.
- Defining a suitable end-of-arm tooling design
- Mounting an EOAT gripper and testing its operation on the robot
- Ensuring correct safety requirements (Collaborative mode or Industrial mode)
- Having CAD models (in the STL file format) of:
- The product to be picked
- The EOAT gripper
- The cell layout
- Having the required software files of the UR5 robot for integration with the Bin Picking Studio
- Having the required network cables for a physical connection between Bin Picking Studio, UR5, and PhoXi 3D Scanner
- Having an HDMI cable for connection between Bin Picking Studio hardware and the monitor screen
Setup:
After all the above requirements had been met, the next implementation steps were:
- Building the cell and integrating hardware
- Integrating Bin Picking studio hardware and software
- Planning gripper grasping, including all potential grasping orientations and picking points
- Calibration of robot vision and the end-of-arm tooling
- Setting parameters
- Optimization of layout, path planning, and robot parameters
- Repeatability testing
The system enables repeatable picking and emptying of random bins filled with 3 different bread products of complex shapes at a picking rate of 6ppm. If the products had a symmetrical shape, the processing speed would be even faster.
The system enables an easy changeover between different products.
Discussion:
This project provides IMR partners and customers insights into the requirements and capabilities of a typical bin picking solution. IMR has invested in a commercial bin picking solution that Irish manufacturers and IMR partners can avail of.
The system can be further optimized by:
- Setting the robot speed to maximum
- Restricting the robot’s joint motions for shorter trajectories
- Using smart memory and fast scanning option
- Optimizing localization parameters available in the system
- Using grasp invariance feature that allows multiple possible grasp points on the product
Zebra Technologies Slovakia s.r.o.
Photoneo is a leading provider of robotic vision and intelligence. Based on a patented 3D technology, Photoneo developed the world’s highest-resolution and highest-accuracy 3D camera, thus unlocking the full potential of powerful, reliable, and fast machine learning.
Discover how Zebra Technologies Slovakia s.r.o. can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteZebra Technologies Slovakia s.r.o. 
Photoneo is a leading provider of robotic vision and intelligence. Based on a patented 3D technology, Photoneo developed the world’s highest-resolution and highest-accuracy 3D camera, thus unlocking the full potential of powerful, reliable, and fast machine learning.
Empowering Future Robotics Innovators with InOrbit Education Edition
InOrbit Education Edition has now launched. This gives qualified educators and students unparalleled FREE access to InOrbit's complete platform
CubeMars: Doubling Torque with Half the Weight - Unveiling Our Advantages
CubeMars: Doubling Torque with Half the Weight - Unveiling Our Advantages
Intelligrated named to SDCE 100 Top Supply Chain Projects for 2016
Intelligrated Voice solution drives accuracy, throughput gains