Tech Papers
What You Don’t Know About Collaborative Robots CAN Hurt You
On October 17, 2019, AMT’s ASG Controls Manager Terry Meister gave a 90-minute presentation at the International Robot Safety Conference entitled What You Don’t Know About Collaborative Robot Safety CAN Hurt You. The conference was sponsored by the Robotics Industries Association (RIA), and took place in Indianapolis, Indiana.
With all the increasing hype and exposure, promises of reduced cost and integration time, more and more people are assuming the people-friendly robots are the best and safest choice. Collaborative robots have the reputation of being easy to use and ready to work with operators off the shelf. This is not always the case, and this article will debunk common myths and give designers tools on how to mitigate operator risks in the collaborative work environment.
It is important to understand how collaborative robot applications can be designed to meet the RIA and other applicable guidelines, and whether the integration of a collaborative robot with other equipment allows designers to capitalize on their inherent safety features.
Examples in this article include work with Kuka, FANUC, and Universal Robots in addition to traditional robots working in collaborative modes, and collaborative robots utilizing secondary safeties.
Definitions
.PNG) The term “collaborative robot” encompasses many different types of devices, which need to be clarified before a meaningful discussion about their safety can occur.
The term “collaborative robot” encompasses many different types of devices, which need to be clarified before a meaningful discussion about their safety can occur.
Collaborative robots are defined in the RIA’s standard RIA R15.06-2012, the industrial robot safety standard. “Collaborative operation” is when a robot works “in direct cooperation with a human in a defined workspace.” A “collaborative workspace” is defined as the “safeguarded space where the robot and the human can perform tasks.”
Figure 1 describes the collaborative robot’s environment. Number 1 represents the operating space that the robot is physically able to reach, and number 2 defines the actual collaborative workspace where the collaborative robot and human operator will interact.
Collaborative robots have several modes of use, and a “transition” is when the robot mode changes between collaborative operation and non-collaborative operation. The RIA standard part 5.4.4 dictates that the system shall be designed so that it does not pose “unacceptable risks” to the operator during transition.
Modes of Operation
Collaborative robots can operate in a number of ways, and there are different safety standards for each. The RIA R15.06-2012 standard defines four categories of safety features for the use of collaborative robots, and all collaborative robots fall into one of these categories.
- Safety rated monitored stop
- Hand-guided teaching mode
- Speed and separation monitoring (SSM)
- Power and force limited (PFL), aka “cobots”
Safety Rated Monitored Stop
With the safety rated monitored stop mode, a robot stops when a human enters the collaborative workspace
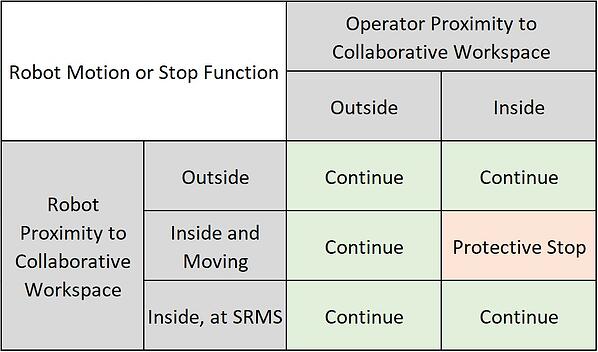
Figure 2 describes how a robot will function under the safety rated monitored stop standard depending on where the robot is, where the operator is, and if the robot is moving. If the robot is outside the collaborative workspace, it will keep working whether the operator is inside or outside the collaborative workspace. If the robot is inside the collaborative workspace, it will only continue to function while the operator is outside the collaborative workspace. If the operator steps inside, the robot will come to a monitored stop. If the robot is inside the collaborative workspace and has already come to a monitored stop, the operator can be inside or outside the space without any change to the robot’s function.
Hand Guided Teaching Mode
In the hand guided teaching mode, the operator uses a device to transmit motion commands to the robot system with a manually-actuating guiding device placed at or near the robot end effector, as seen in Figure 3.

 Speed and Separation Monitoring (SSM)
Speed and Separation Monitoring (SSM)
Robots using the speed and separation monitoring (SSM) mode have their speed controlled based on a defined separation distance between the robot and a human entering the workspace. For SSM, external safety devices are used (such as an area scanner), and safe distance calculations must be performed. Figure 4 illustrates how the robot’s speed decreases as the operator enters zones near the robot’s workspace.
Power and Force Limiting
With a power and force limiting (PFL) robot, the robot’s speed, torque, and motion are controlled so that if there is a collision, there will be no injury or pain to the human operator. The PFL safety functions are provided with these robots.
There are several common misconceptions concerning PFL robots. One misconception is that operators can work at the same time and in the same space as the PFL robot with no guarding. This is not always the case; depending on the complete system, there may be other dangers, such as pinch points, end-of-arm-tools, crush hazards, etc. You MUST look at the complete system as a whole and not just the robot itself.
Another misconception is that the PFL robot will operate faster and be more productive than a human operator. This is not always the case because with a PFL robot, the speed of the robot is limited for safety reasons; in some instances, an operator can work faster and more productively.
Despite the fact that PFL robots are designed to do no harm, there is still a need for a risk assessment. Once it is designed, the complete system needs to be evaluated for any potential risks. The robot may or may not pose the risk, but all elements of the system need to be reviewed.
Some users assume that since the robot is collaborative, the system it is integrated into will be defined as collaborative as well. This is not the case because again, the system needs to be evaluated as a whole.
Additional Safety Considerations
There are many additional specific types of hazards that should be considered with collaborative robots. In addition to impact and crush hazards, operators need to be protected from robot and gripper hazardous motion, hot surfaces, clamps, and other machinery within the cell. Collaborative safety regulations require that the operator is protected from these types of hazards:
- Impact with gripper
- Impact with part
- Add impact by robot wrist
- Add impact by robot arm
- Crush between arm and non-supporting structure
- Crush between gripper and fixture
- Crush between part and fixture
- Crush between arm and fixture
- Crush between arm and non-supporting structure
- Finger entrapped in gripper or part opening
- Finger crushed between gripper and part
Always put the operator’s safety first when working with collaborative robots, and consider any potential contact between the robot and the operator. Take both active and passive risk reduction measures such as those described below.
Contact Between Robot and Operator
In some circumstances, there could be contact between the robot and operator. Users should identify conditions in which such contact would occur and evaluate the risk potential for each case. The robot and its work area should be designed so that robot-operator contact is infrequent and avoidable, and apply risk reduction measures to keep the contact situation below threshold limit values. Remember to consider things like:
- Exposed operator body regions
- Probability of occurrence
- Type of contact event
- Contact area
- Speeds
- Forces
- Pressures
Passive Risk Reduction Methods
Several methods can be used to passively lower the risk to operators. Designers can increase the contact surface area by rounding edges and corners, smoothing surfaces, and installing compliant surfaces. Another passive means to prevent operator injury is to install materials such as cushioning or deformable components to absorb energy. Designers can also limit the moving masses of the system, extend the energy transfer time, or reduce the impact forces with compliant joints or links.
Active Risk Reduction Methods
Designers have a variety of techniques to consider for active risk reduction:
- Limit forces or torques
- Limit velocities of moving parts
- Use a safety-rated soft axis and space-limiting function
- Use a safety-rated monitored stop function
- Use sensing to anticipate or detect contact with the operator
Real World Applications
Three automotive-industry applications with collaborative robots will be discussed.
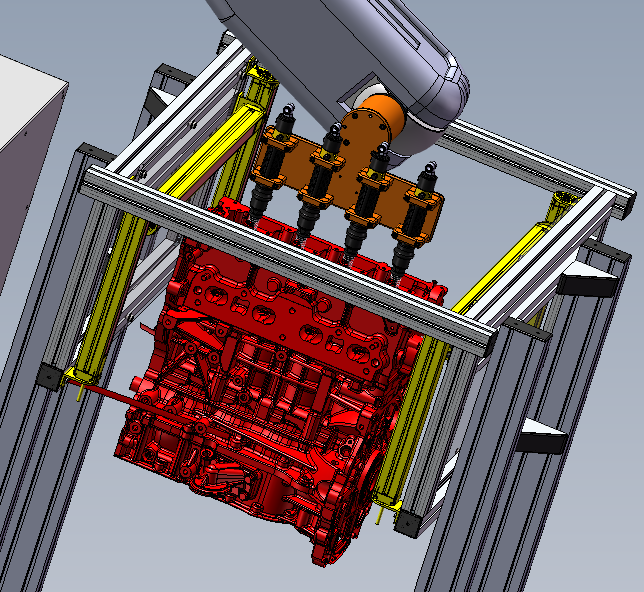
In the work cell shown in Figure 5, the operator loads four spark plugs into the end of arm tooling (EOAT) then initiates the robot motion by pressing a button on the robot. While the robot is inserting the spark plugs into the engine, the operator steps to an adjacent station.
.jpg)
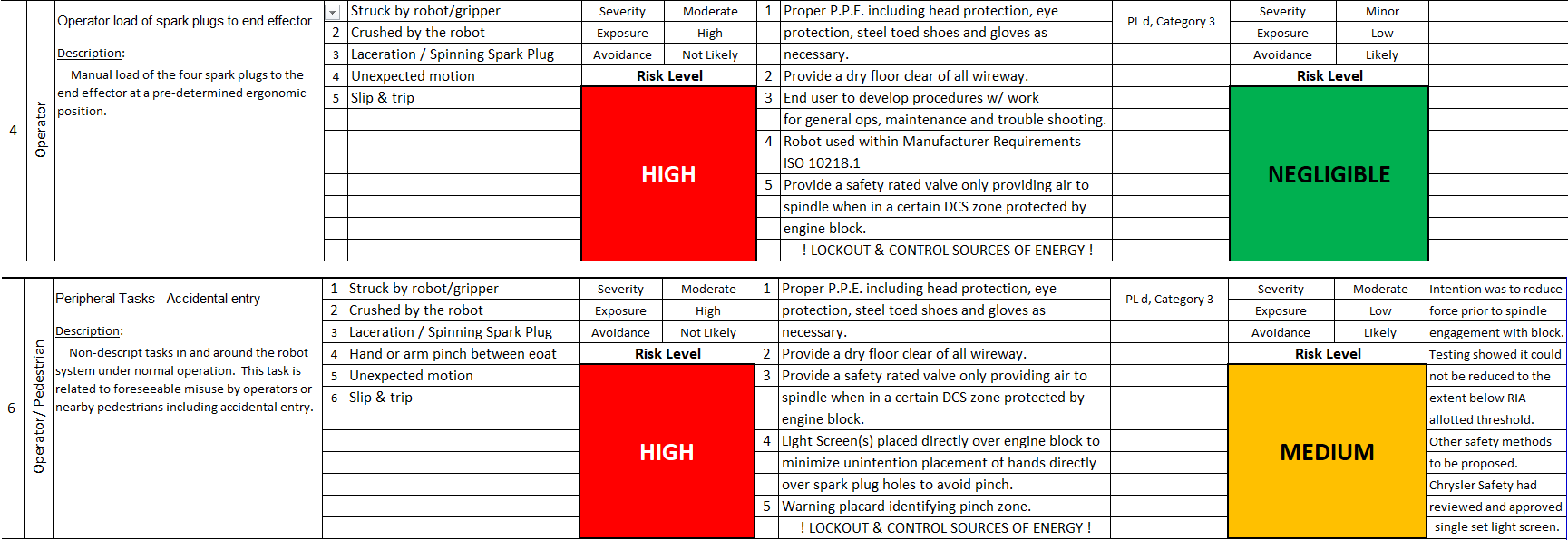
Analysis of the spark plug insertion procedure produces the risks detailed in Figure 6. When the operator is loading the spark plugs into the EOAT, five operator risks have been identified. For each of these risks, Figure 6 shows the corresponding risk level, severity, and method of avoidance. For operators working on peripheral tasks at the station, six risks have been identified, along with the risk level, severity, and method of avoidance for each.
The end result is a design that has a redundant system, as shown in Figure 7.
 Electronic Control Unit (ECU) Test Cell
Electronic Control Unit (ECU) Test Cell
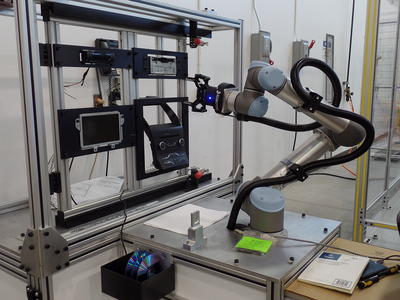
In the ECU test cell, the operator loads the variant carrier into the test stand and then initiates the robot, which tests the knobs, buttons and CD exchange function of the ECU, as seen in Figure 8.
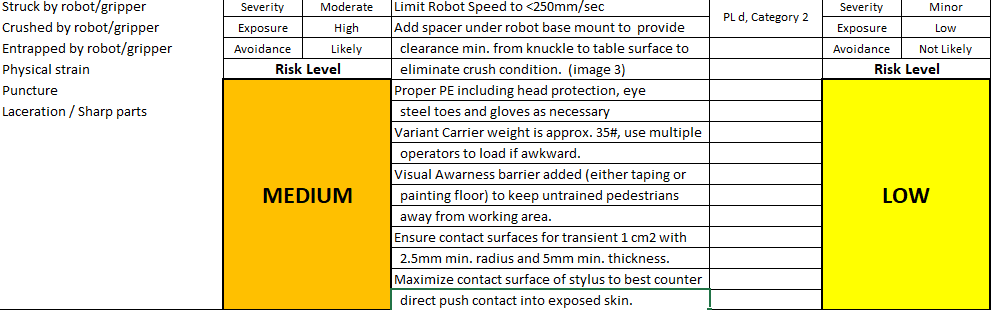
Figure 9 (below) shows six identified operator safety risks at this station, and the severity, exposure, and avoidance categories for each. There is also a list of the safety precautions that should be undertaken to avoid these risks.
.jpg) The end result is a station which is safe for the operator without the need for external guarding or safety fences, as shown in Figure 10.
The end result is a station which is safe for the operator without the need for external guarding or safety fences, as shown in Figure 10.
Summary
What you don’t know about collaborative robot safety CAN hurt you, and there are several things to remember when designing a system. First, know that safety depends on the complete application, not just the robot, and to evaluate the system as a whole. Next, conducting a risk assessment is still critical to operator safety, despite the use of a collaborative robot. Designers must also understand the hazards that a power and force limiting robot adds to a system, and protect operators against potential harm. Finally, designers must continue to learn and engineer passive and active risk reduction methods as collaborative robots and their use evolves in future applications.
Applied Manufacturing Technologies
Applied Manufacturing Technologies is an industry leader in automated end of line solutions, advanced material handling systems, and engineering support globally
Discover how Applied Manufacturing Technologies can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteApplied Manufacturing Technologies 
Applied Manufacturing Technologies is an industry leader in automated end of line solutions, advanced material handling systems, and engineering support globally
The End of Separation: Man and Robot as Collaborative Coworkers on the Factory Floor
A new realm of industrial robotics is upon us. Human-robot collaboration is here, on the manufacturing floor, viable and successful.
Michael Jacobs to Participate in Panel Discussing Successful Automation During the AI and Robotics Symposium at University of Michigan on November 1
Founder and President Michael Jacobs will speak on a panel entitled Expert Tips on Successfully Automating..
The Future Of The Industrial Robot Is Safe
Collaborative Robots have now found their place safely on to the factory floor.