News
POSITRON Whitepaper: Safety for Humanoid Robots
Cutting power to a humanoid robot doesn't make it safe — it makes it fall.
Traditional industrial safety relies on Safe Torque Off (STO): kill the motor, eliminate the hazard. But humanoids are inherently unstable inverted pendulums. Cut power, and 70+ kg of metal crashes to the ground. That's not safety — that's a new hazard.
Synapticon's new whitepaper, "Out of the Cage: Advanced Functional Safety for Humanoids — POSITRON Safety AI Architecture," tackles this head-on. Authored by Dr.-Ing. Florian Weisshardt, Dr.-Ing. Tim Fröhlich, and Dieter Volpert, the paper introduces a three-tier safety architecture built for machines that walk among us.
Tier 1 — Multi-Axis Safe Motion
Hardware-level safety for 50+ degrees of freedom, distributed across SOMANET™ servo drives via the FSoE (Fail-Safe over EtherCAT) backbone. Safe Active Damping keeps the robot upright instead of letting it fall. Safely-Limited Speed (SLS) and Safely-Limited Torque (SLT) are monitored decentrally in every drive — distributed intelligence that scales with the complexity of humanoid kinematics.
Tier 2 — Safe Human Detection
A 3D volumetric protection system identifies people in the robot's environment in real time. Dynamic safety zones adapt continuously based on the robot's actual fall zone — not on static minimum distances. Implementation follows IEC 62998 for camera-based protective systems.
Tier 3 — AI Behavioral Safety
Multimodal foundation models analyze the scene semantically, enabling context-aware Safe Situational Motion. The architecture rigorously separates the deterministic safety loop from the non-deterministic AI control — compliant with ISO/IEC TR 5469 and ISO/IEC TS 22440.
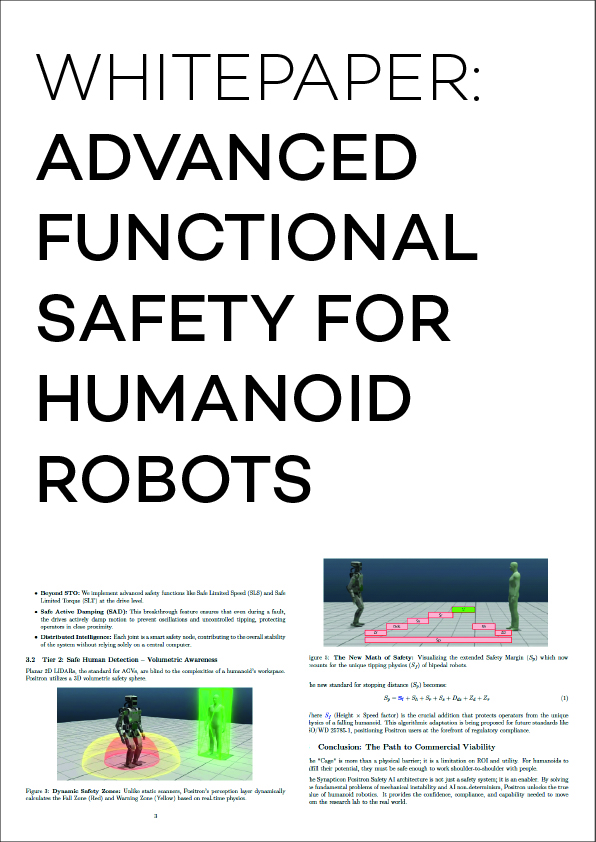
A new safety formula for humanoids
The whitepaper introduces an extended safety distance formula:
S_p = S_f + S_h + S_r + S_s + D_ds + Z_d + Z_r
The new term S_f describes the fall zone — the area swept by a falling humanoid. This parameter does not exist in any classical safety standard for industrial robots, but it is physically essential for upright walking machines.
Functional safety as enabler, not obstacle
Safety is not the constraint that holds humanoids back from the factory floor or public spaces. Done right, it is the key that opens the cage.
Visit Synapticon at Automate 2026, Booth 1590 to see POSITRON Safety AI in action.
Synapticon GmbH
Discover how Synapticon GmbH can support your automation journey with their complete range of solutions and expertise.
Visit Company Website