Industry Insights
'Optimal' Robot Has 20 Legs
Robots have long been designed to mimic animals in the natural world, be they insects, dogs or humans. While engineers have taken inspiration from plenty of quadrupeds and bipeds, new research suggests that the most optimal robot body might be more akin to a sea urchin.
“Robotics has spent the better part of a century learning from biology by copying its forms; quadrupeds from dogs, humanoids from us, and manipulators from arms. That has been productive, but it has embedded a quiet assumption: that the right thing to imitate is the shape,” says Boyuan Chen, one of the leading researchers of the study. “We wanted to ask a different question. What if the more powerful lesson from nature is not any particular silhouette, but a deeper organizational principle that shows up across enormous evolutionary distance. That principle is symmetry."
Symmetry goes beyond aeshtetics. It's critical part of how living systems sense, move, and recover under disturbance. “We wanted to capture that property formally and apply it to robot designs. We want to challenge the view that the robot designs have to copy existing species directly” Chen told A3.
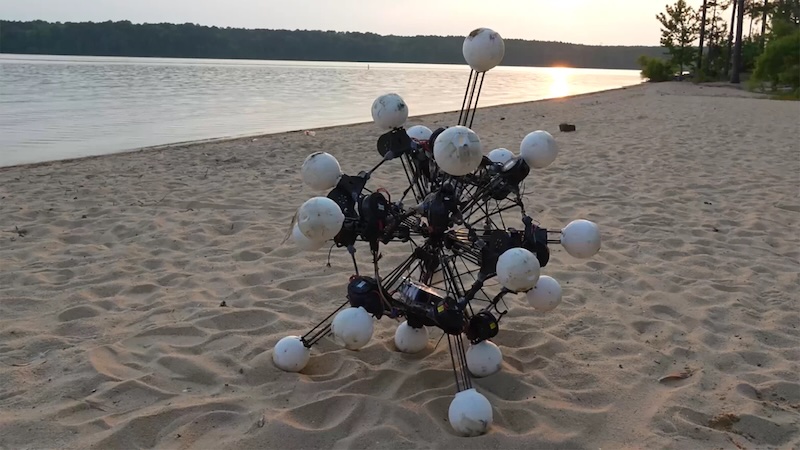
This new robot is a 20-legged robot, called Argus, that has no front or back. These telescopic legs only cost $300 and radiate out from the central body and contain a depth camera on each leg tip. This interesting design means that the robot can move in any direction, scale walls, move through trees and over rough terrain, and stabilize itself if pushed. It can also carry payloads up to 10 pounds.
The symmetry of the robot was determined using dynamic isotropy—a mathematical framework that determines the level of symmetry in a robot and gives a score between zero and one, depending on how evenly they can accelerate their body in every direction. A score of 1 means that a robot can move and react identically in all directions, and humanoid, quadrupedal robots and drones all have a score below 0.6. With its 20 legs, Argus scored 0.91 -- very close to the theoretical maximum.
This high score was only possible due to the regular dodecahedron shape of Argus that consisted of 2 pentagonal faces and gave the robot an almost uniform field of view. This design also enabled the robot to move without needing to continually reorientate itself like other robotic designs.
“Across more than 1,500 simulated morphologies, a higher dynamic isotropy consistently correlates with lower tracking error, higher task success rates, lower cost of transport, and improved resilience to actuator failure—and the gains accelerate as the value approaches its theoretical maximum” Chen told A3.
While Argus sports 20 legs, Chen notes that this isn't necessarily the magic number. “The mathematics behind our dynamic isotropy framework says that to push the score toward its theoretical maximum, you need actuators distributed as uniformly as possible on a sphere. Our simulation sweep across leg counts from 6 to 40 showed that isotropy plateaus between 16 and 22 legs”. Beyond this range, the design adds extra mass, mechanical complexity, and control overheads for diminishing returns.
Get the Training You Need for a Safer Workplace!
Autonomous mobile robots are one of the fastest-growing segments of the robotics industry. During this live virtual training, you'll be introduced to safety protocols and best practices for working with mobile robots in industrial settings.
Learn more and register now for upcoming training dates.
On the decision to choose 20 legs, Chen confirms that, “within that plateau, we wanted a leg arrangement that was also good to build. The vertices of a regular dodecahedron give you 20 actuators distributed near-uniformly across the sphere, and the polyhedral edges give the structural frame natural stiffness. The 20 faces become natural housings for electronics and wiring. So, 20 is the right answer for this particular design: a one-degree-of-freedom linear-actuator architecture optimized for buildability”.
To test the design, the team rolled the robot across concrete, grass, dense foliage, soft sand, wet surfaces and bark. Argus was able to handle obstacles up to 5 inches tall, climbed lunar-gravity walls at 0.24 m/s, kept moving when three of its 20 legs were broken, and pushed a one-meter cube while rolling.
Argus is a proof-of-concept design that has been developed to show the importance of a new design approach and not explicitly designed for real-world scenarios. However, Chen did tell A3 that the closest near-term applications are “environments where the world refuses to behave the way it did in the lab, and the inspection of unstructured spaces, such as pipelines, mines, oil/gas, agricultural fields, and post-disaster sites”. In the longer term, mobile sensing platforms where orientation is unpredictable or uncontrollable could benefit from a body that has no preferred direction, and low-gravity and planetary mobility is a potential far future application where the lunar-gravity climbing demonstrations are directly relevant.
It also turns out that so many legs may not be an inconvenience in the real world.
“Twenty legs sound like a lot until you look at the design: every leg is identical, same actuator, same camera, same cable-driven drum. There is one part to mass-produce and one part to maintain. That is mechanically simpler, not harder, than designing four highly specialized limbs,” says Chen. "For structured environments, such as flat warehouse floors, sidewalks, and indoor logistics, a conventional quadruped or AGV will remain more efficient, and we are not pretending otherwise. Dynamic symmetry is a design lens, and the same framework can be used to make humanoids and drones more isotropic, too. Therefore, it’s not just about a new robot, but a new design principle that inspires future roboticists to guide novel robot designs."
When asked about where the research goes next, Chen told A3, “Our immediate next steps are to keep pushing the idea of dynamic symmetry on other forms of robot designs and applications. Beyond any single robot, my group's broader agenda is what we call Discovery Machines, building machines that learn, act, and collaborate by discovering how the world works. Argus is one expression of that mission: a robot whose body was discovered by searching across a thousand candidates against a principle drawn from nature. The next ones will be discovered the same way."
Association for Advancing Automation
Discover how Association for Advancing Automation can support your automation journey with their complete range of solutions and expertise.
Visit Company Website


