Industry Insights
The Realm of Collaborative Robots – Empowering Us in Many Forms
No area of industrial robotics has attracted more fanfare than human-robot collaboration. You can’t deny the compelling nature of collaborative robots. They have an innate ability to both fascinate and empower us humans.
With the hype come misconceptions. We will try to dispel these myths, while tackling the growing debate over safety. We’ll also explore the latest developments in this domain and see how researchers on two continents are helping to shape our factories of the future.
 We’re hot on the heels of Automatica 2014, where collaborative robots were the toast of the town in Munich. King on its home turf, KUKA made a big splash showcasing its lightweight arm. Meanwhile, the nimble UR from Denmark was popping up all over the show floor. The poster boy for cobots also had cause to celebrate as its founder, Rodney Brooks, received the highest honor in the robotics industry, the Engelberger Robotics Award.
We’re hot on the heels of Automatica 2014, where collaborative robots were the toast of the town in Munich. King on its home turf, KUKA made a big splash showcasing its lightweight arm. Meanwhile, the nimble UR from Denmark was popping up all over the show floor. The poster boy for cobots also had cause to celebrate as its founder, Rodney Brooks, received the highest honor in the robotics industry, the Engelberger Robotics Award.
Since we published our primer a year ago, the collaborative domain has broadened significantly. The variety of robots and forms of collaborative operation that occupy this space are head-spinning.
Plus a host of new players are poised to join the cobot scrimmage on an international scale: Kawada’s NEXTAGE, gomtec’s Roberta®, pi4_workerbot, Bionic’sBioRob, F&P’s P-Rob, Epson’s dual-arm (concept), and ABB’s DACR (concept).
The cobots’ sphere of influence seems to be on the cusp of something really big.
Companies Large and Small in the Collaborative Space
Leading the charge, the Robotic Industries Association (RIA) held the first-ever Collaborative Robots Workshop this past April in Boston. The sold-out crowd of 200-plus engineers represented an impressive array of Fortune Global 500 corporations. Automotive and aerospace OEMs, consumer products conglomerates, e-commerce giants, and new robotics innovators were all on tap for a jam-packed day of presentations by major suppliers and researchers in collaborative robotics, many of whom provide insight for this article.
“A lot of big manufacturers are considering collaborative robots and starting to look at automation in different ways,” says Samuel Bouchard, President of Robotiq, a manufacturer of adaptive grippers for collaborative robots in Lévis, Quebec, Canada. “Traditionally, they would want to automate a specific area in their plant, so they would get an integrator in place to automate that part of the process. It was a top-down engineering approach.”
“That still exists for complex automation applications, but now with collaborative robots, there’s also a new tactic,” says Bouchard. “Many large manufacturers are looking at a bottom-up approach, where they want to approve a collaborative robot tool and then make it available for anybody in the plant to use on demand for simple, stand-alone operations. That’s a very different approach.”
![]() Responding to increased demand, RIA will host a follow-up to its inaugural workshop this fall. The International Collaborative Robots Workshop will be held on September 30, 2014, at the San Jose McEnery Convention Center in Silicon Valley.
Responding to increased demand, RIA will host a follow-up to its inaugural workshop this fall. The International Collaborative Robots Workshop will be held on September 30, 2014, at the San Jose McEnery Convention Center in Silicon Valley.
Plenty of Room for All
One of the hot topics addressed during April’s workshop was the common misconception that “collaborative robot” only applies to a select few robots. From lightweight single arms and dual-arm humanoids, to traditional heavyweights – even a SCARA – robots capable of collaborative operation come in many forms.
Most importantly, they differ in the technology each robot uses to achieve collaborative operation and the safety mechanisms required to occupy this sometimes fenceless collaborative workspace. Not all collaborative robots are cage-free.
“When we’re talking about collaborative robots, we’re talking about more than just power and force limiting applications, more than just Baxter and Universal,” says Pat Davison, RIA’s Director of Standards Development in Ann Arbor, Michigan.
Other robots in the collaborative arena use power and force limiting. Plus, many traditional robots that aren’t power and force limited can still work in human collaborative operations with the use of functional safety units and safety-rated sensors.
Before we dig deeper, a few definitions:
Collaborative Robot – A robot designed for direct interaction with a human within a defined collaborative workspace.
Collaborative Workspace – A safeguarded space where the robot and a human can perform tasks simultaneously during production operation.
Collaborative Operation (Human-Robot Interaction or HRI) – A state in which purposely designed robots work in direct cooperation with a human within a defined workspace.
What’s Your Risk?
Safety is often central to the debate in human-robot collaborative circles. Technology too often outpaces the safety regulatory bodies.
 "Technological advances are coming fast and furious,” says Davison. “Standards development is still struggling to catch up. We’ll probably continue to be that way for quite awhile.”
"Technological advances are coming fast and furious,” says Davison. “Standards development is still struggling to catch up. We’ll probably continue to be that way for quite awhile.”
The latest international ISO 10218:2011 and U.S.-adopted ANSI/RIA R15.06-2012 safety standards have been globally harmonized and identify four types of human-robot collaborative operation:
- Safety-rated monitored stop
- Hand guiding
- Speed and separation monitoring
- Power and force limiting
Collaborative operation must satisfy at least one of these criteria to meet the standards. This article describes the four types of collaborative operation and how different robotic technologies satisfy the criteria.
An updated Canadian standard, CAN/CSA Z434, is currently under review and expected to be released by the end of 2014. With the exception of some national deviations, the Canadian standard will emulate the international and U.S. standards.
No matter the type of the robot or the kind of technology it uses to achieve collaborative operation, the conversation always comes back to a risk assessment.
“Engineers always want ‘the’ number, but we just can’t provide one,” explains Davison. “We do not have a power and force limiting value in the standard. (The previous 80 watt/150 newton power and force limits were removed in the most recent standards.) It’s not about the force; it’s about where the force is being applied. And it’s not about the machine; it’s about what the person is doing.”
“We can put controls on the machine, but that doesn’t mean that something is or is not safe,” says Davison. “You cannot make an assumption about what the person is going to be doing when a robot is performing its task. Unless we could absolutely control people the way we can control machines, a risk assessment is our best guidance.”
Michael Gerstenberger, Sales Senior Applications Engineer at KUKA Robotics Corporation in Shelby Township, Michigan, and a member of the R15.06 safety subcommittee, begins some of his safety presentations by saying “There is no such thing as a safe robot.”
“Meaning the robot itself is only part of the equation,” he explains. “Even if I can make the robot so it won’t move fast enough to smack you and it won’t press hard enough to squeeze you, if you put a knife or a laser or a drill at the end, it’s going to hurt you. It often depends more on what it’s doing and what kind of tool it has rather than the robot itself.”
RIA’s Davison also notes that it makes a difference where on the body the robot could potentially collide with a person while in collaborative operation. Certain areas of the human body are more sensitive than others, and this often varies among people of different stature, gender, age and pain tolerance levels. Bottom line – Do a risk assessment.
He says ISO TS 15066 is in the works and expected for release late 2014 or early 2015. The technical specification will take some of these factors into account and provide more guidance on how to conduct a risk assessment.
Robot+1
What many don’t realize is that most conventional industrial robots are capable of satisfying the first three types of collaborative operation with the appropriate control architecture, software, and safety-rated sensors. It wasn’t until the adoption of the latest standards, however, that these robots had the freedom to shed some of their traditional barriers and invite the humans into the robot+ circles.
This video shows Erik Nieves, Technology Director for Yaskawa Motoman in Miamisburg, Ohio, demonstrating how functional safety enables collaborative robot operation in a progressive assembly task. The safety-rated monitored stop and the speed and separation monitoring methods of collaborative operation apply.
“Collaboration comes in different flavors,” explains Nieves. “There’s collaboration thru control, of which Yaskawa is an advocate. Then there is collaboration thru FLRs, force limited robots. That’s the distinction that the standard makes. You can do collaboration this way, or you can do it this other way. Should you choose to do collaboration with an FLR, there are now additional other special considerations you need to take into account in the risk assessment process.”
 “Our approach to Asimov’s first law of robotics is that you can’t harm a human because you don’t hit the guy. Never hit the guy. We use a sensor, so we know where the people are and how the robot should behave. That’s collaboration through control.”
“Our approach to Asimov’s first law of robotics is that you can’t harm a human because you don’t hit the guy. Never hit the guy. We use a sensor, so we know where the people are and how the robot should behave. That’s collaboration through control.”
“The risk assessment process becomes much cleaner if we just take it as a tenet that the robot will not hit the person,” he adds.
“Collaboration must be driven by the use case,” says Nieves. “What is the goal for this piece of automation? What’s the payload? What precision is needed, what are the repeatability requirements, and what cycle time is required?”
“All robots that meet 10218 are collaborative,” adds Nieves. “Don’t get hung up on what the robot is called. What do you want to achieve?”
Functional Safety
Nieves says one of the benefits of functional safety is fewer sensors: “You always needed to know where the people are, but pre-FSU (functional safety unit) you also needed to know where the robot was. You had to install additional sensors around the robot just to ensure the position of the arm. Functional safety now allows us to eliminate all these robot-centric sensors.”
Functional safety also facilitates more user-friendly progressive operations, such as those common with assembly tasks.
“Previously, the robot would have to put a part down and leave the space for the human to do his operation. You couldn’t have them occupying the same space. Now, with functional safety, the robot can take the part back to the operator and never let it go. The robot can just show it to him, okay do what you have to do, and then take it back over here. That’s a much more natural interaction.”
“Functional safety is supported on most Yaskawa robots on the DX 100 controller or its successor, the DX 200 controller,” says Nieves.
The “Sensitive” Robot
KUKA’s Gerstenberger discusses two strategies for ensuring operator safety. One is to avoid contact with the person completely. The second strategy is to reduce the consequences of contact.
“Avoiding contact is basically the strategy of safety-rated monitored stop and speed and separation monitoring,” says Gerstenberger. “Even in hand guiding, you’re grabbing hold of a device on the robot to move the robot around, but you’re in control.”
“Those three forms of collaboration can be implemented on all KUKA robots,” he says. “Our LBR iiwa adds the power and force limiting function, which allows it to be used in direct contact with a person.”
“The LBR iiwa is in the same class as Universal and Baxter, in that it’s able to be used in an application where, if there is contact with a person, we can limit the force that’s applied using the proper safety-rated technology,” says Gerstenberger.
Other features put the LBR, which stands for Leichtbauroboter (German for lightweight robot), in a class of its own. It recently won the Red Dot Award: Product Design 2014. Its sleek design and smooth, rounded shapes are not only good-looking. They also reduce the risk of injury in human-robot collaborative applications.
According to KUKA, the LBR is the only robot in the world with joint torque sensors integrated into the mechanical system with a redundant, safe design. It’s also touted as an “extremely sensitive” robot with highly responsive collision detection.
This video demonstrates the KUKA LBR iiwa collision detection feature.
The housing is made entirely of aluminum, so it’s very portable. It comes in two models handling payloads up to 7 kg and 14 kg. With respective weights of 23.9 kg and 29.9 kg, the LBR provides impressive payload-to-weight ratios. New control technology combines safety, robot, logic, and process control in one compact cabinet.
Teaching by Demonstration
Addressing the needs of small to medium-sized enterprises, the LBR also has a teaching by demonstration feature. The program structure is programmed offline with the waypoints left blank, so that even an operator with no programming knowledge can guide the robot to the desired positions and teach those points. This helps with small-batch runs or the large product variety typical of SMEs. The robot programming is also Java-based for ease of use and openness.
This video shows KUKA’s teaching by demonstration feature in action.
Ease of teaching, as opposed to programming, is just one example of how collaborative robotics empowers its human operators.
Overnight Automation
Universal Robots lightweight, portable arms have found widespread appeal among small to midsized businesses. The Denmark-based cobot manufacturer recently announced the grand opening of a new 12,000-square-meter production facility to keep up with the demand.
“A lot of our distributors in North America are starting to place stocking orders and inventory the robots,” says Edward Mullen, National Sales Manager North America for Universal Robots USA Inc. in Stony Brook, New York. “We’re not only shipping robots globally within weeks or days, our distributors are now offering robots the same day to a lot of their end users.”
 Same-day robotic automation! We have come a long way since distributors for the UR series first hit the pavement.
Same-day robotic automation! We have come a long way since distributors for the UR series first hit the pavement.
“We’re not going after traditional robot applications,” says Mullen. We’re looking at all those applications that robots couldn’t do for reasons such as expensive guarding, or human interaction, or very complex programming, or just simple throughput.”
“That’s why Universal Robots is so appealing to small and medium-sized businesses. They don’t have the volume to justify a $70,000 robot and $150,000 installation, and then more for software development. So we created our own marketplace.”
It’s not just the smaller enterprises that are taking note.
“We’re also being looked at heavily by the big guys, the automotive OEMs and consumer electronics manufacturers,” says Mullen. “They have applications just like SMEs that couldn’t be justified with the big robots. Now the small, flexible, unguarded UR becomes appealing.”
Robotic Production Assistant
The UR goes where robots didn’t dare to go just a few years ago, to the other side of a heavily roboticized factory floor, where mostly manual operations rule. Here, human workers are getting a boost from their robotic production assistants.
This video shows a UR10 robot on the job at a commercial shelving manufacturer in Montreal, Canada. The cobot performs pick-and-place operations unloading a press brake machine used to bend steel parts.
“Etalex is a perfect example of a company accustomed to robotics, but now using it in different applications,” says Mullen. “They have 30-plus FANUC robots all over the plant. But they have this press brake that bends metal for shelving. It’s used on hundreds of different types of parts and the location of the press brake is right on the aisle.”
“In order to install a conventional robot, you would have to either move the press brake, which they don’t have the real estate, or figure out a way to reroute the flow of people working around the machine,” explains Mullen. “They couldn’t justify it. Plus there were all the different parts. They would have to have hundreds of different programs, and it becomes very expensive.”
“Within 3 days, they had the UR up and running, taking the bent parts off of the press brake and stacking them onto a cart.”
According to Mullen, his customer’s UR installation frees up 7 man-hours a day. The employee previously tending the machine was relocated to other tasks. Automation has cut the price of production, resulting in a 40 percent increase in sales with no staff layoffs.
“Etalex has an engineering department, which did most of the set-up,” explains Mullen. “But we spent some time with the floor supervisor. Once he grasped teaching the robot programs himself, that’s really when we saw the difference these robots can make.”
Empowering Human Coworkers
“We’ve seen it many times with machine tool tending,” says Mullen. “That’s probably one of the most repetitive, mundane jobs. By taking that workforce and having them work with technology to the point where they can actually see something they’ve programmed work and be productive, it’s thrilling to see what that does for people’s morale.”
As is common with many of the robots in this class, the UR is more taught than programmed.
“When you change a part, you don’t change the entire program,” explains Mullen. “All you do is re-teach the pick and the place points. So you’re grabbing the teach pendant and you’re releasing all the motors (back-drive mode). Then you’re grabbing the robot and physically moving it to a pick point. That’s what the operators are doing on a daily basis at Etalex.”
“When you’re dealing with a conventional industrial robot, the operators are just supervising loading and unloading,” says Mullen. “They’re really not involved hand to hand with the robot. To take a person in that role and have them stand next to a robot, holding a teach pendant and programming the robot, even though they’re not writing code, but making the robot do something different than what it was doing before, that’s really the game changer.”
Mullen says his customer’s employees report feeling safer with the UR on the job. Previously, they had to place their hands in the potentially dangerous press brake to remove the parts.
Anything But Ordinary
Rethink Robotics’ Baxter has its own bragging rights. The latest software release, version 2.1, doubled the robot’s speed, making it better equipped for higher-performance tasks.
This video shows Baxter in a side-by-side comparison of the 2013 and 2014 software versions.
“Our collaborative robot is a piece of automation that you’re going to buy for multiple projects, not just one,” says Carl Palme, Applications Product Manager at Rethink’s headquarters in Boston, Massachusetts. “By creating this software and upgrading it, not only are we making it easier for our users to solve their applications, but we’re actually increasing the performance of the hardware.”
“For example, in January 2013, when we released our initial version of the software, the robot was only trained to do vertical tasks,” says Palme. “It was just picking up things on a table and putting them in a box. The movements were very gantry-style. Fast-forward to today, our robot is moving twice as fast and we can perform tasks in any orientation in space.”
Palme describes another new software feature called ‘nudge’ that allows the operator to move the position of the robot arm without having to retrain the entire task.
“For example, if the robot was missing a fixture by a quarter of an inch, normally you would have to retrain that task to get it precisely where you want it,” explains Palme. “But now, through the software interface, you can manually nudge the robot incrementally in either direction. You can redefine where and how it goes into the fixture. It increases both accuracy and training speed.”
Beyond squashing bugs and enhancing the GUI, software updates that improve hardware performance are unusual in the robotics industry.
“You can download the latest software version of our operating program (much like you would a software update for your smartphone) and now the robot does all sorts of different things,” says Palme. “It’s a way for our customers to maximize their investment.”
 Unlike many of its robot peers, Baxter is intuitive. It has a measure of common sense.
Unlike many of its robot peers, Baxter is intuitive. It has a measure of common sense.
“If the robot drops a part (as might be the case if a human coworker bumps into it), Baxter stops midstream and goes back and grabs another part,” explains Palme. “That’s a very unusual and unprecedented approach for a robot. When the robot drops the part, most people expect Baxter to simply continue on, because they think it’s just a dumb robot. Baxter’s adaptability is sometimes uncomfortable for people to get used to. It’s so atypical of a traditional robot.”
Like its namesake, Rethink is anything but ordinary. “We’re taking a slightly different approach to automation, so we need to educate the audience on why these things are important and how they can help them solve problems,” he adds.
Flexible Workforce Multiplier
This video demonstrates how industrious cobots not only help solve problems, but also make their human coworkers feel more empowered. Especially when the robot has, dare we say, personality. This tends to facilitate the kinship between man (or this case, woman) and machine.
“In this case, the operator at Vanguard Plastics got a promotion and is now the shipping manager,” says Palme. “Baxter is intended to be an addition to your workforce. It is not a replacement for humans.”
“You’re adding the capability to work 24/7. You’re adding the ability to keep your staffing levels consistent even during periods of cyclical increases, like during holiday seasons. You’re able to balance out your workforce through an investment in technology that is very scalable, very flexible, easily implemented, and can change from line to line. Baxter is a flexible workforce multiplier.”
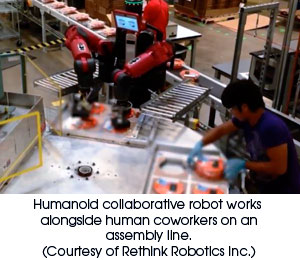
This video shows Baxter on the job working comfortably alongside his human coworkers in assembly operations.
“We have taken great care in making sure people feel comfortable working around the robot, however, we do recommend that users always conduct their own safety assessment,” says Palme. “The safety considerations will depend on the entire robot system, including the path design, the end effector, and the parts themselves.”
What’s the perfect complement to this breed of barrier-transcending, go-anywhere, human-empowering shop floor taskers? How about an adaptive gripper designed especially for them and the kinds of high-mix, low-volume applications for which they’ve grown accustomed.
Adaptive Cobot Hands
Robotiq is unique in that, as a relatively new robotic gripper manufacturer, they made a strategic decision to pursue this equally adolescent human-robot collaborative market. But why them, and why now?
President Sam Bouchard provides insight: “For some time, industrial robotics has pushed the boundaries of repeatability, speed and reliability. We’re at a point now where any new increase takes a lot of effort and doesn’t achieve that much. The collaborative robots are kind of a step back in a sense. They are not as repeatable, they’re not as fast, but it’s just a different approach and it’s more flexible.”
“Our grippers, just like the robots, are not more precise, they’re not faster, and they’re not stronger. What they are is more flexible and that’s what collaborative robotics is about. It fits very well with our products and our approach.”
To understand where Robotiq is going, it helps to understand where they began.
Established almost 6 years ago, Robotiq is a university lab spin-off. The gripper manufacturer still collaborates with its Quebec City-based incubator, the Laval University Robotics Laboratory. The lab mainly focuses on the study of parallel mechanisms and articulated robotic hands.
Whether developed for industrial, nuclear or space applications, the technology always faced the same challenges: the need for flexibility, robustness and simplicity. Robotiq licensed some of the technology, turned into a 3-finger adaptive gripper, and went after high-mix, high-changeover industrial applications.
“We ended up selling the 3-finger gripper, but mainly into the R&D field,” says Bouchard. “So we took a step back and said, okay, there’s definitely a need for flexibility, but the product needs to be simpler, and it needs to be easier to integrate with the robots on the market. So that’s why we came out with a simplified design, which is our 2-finger gripper.”
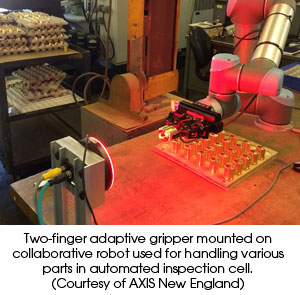
This video shows the Robotiq 2-finger adaptive gripper and a Universal UR robot in a machine tending demonstration.
“Usually, the kind of applications we get into are not robotic, they’re manual applications,” says Bouchard. “A company gets a flexible robot and they need a flexible tool to pick many different parts, or to do a lot of changeovers.”
 “A typical example would be an automotive brake pad manufacturer,” explains Bouchard. “They’re going to have hundreds of different models. They’re going to make brake pads for one of their OEM customers for 2 hours. Then they’re going to change the models. It’s going to be a different geometry, so that means choices. Either they have a lot of custom grippers with tool changers or manual set-ups, or they have a flexible, programmable gripper.”
“A typical example would be an automotive brake pad manufacturer,” explains Bouchard. “They’re going to have hundreds of different models. They’re going to make brake pads for one of their OEM customers for 2 hours. Then they’re going to change the models. It’s going to be a different geometry, so that means choices. Either they have a lot of custom grippers with tool changers or manual set-ups, or they have a flexible, programmable gripper.”
Robotiq’s clients include automotive OEMs and Tier 1 suppliers, consumer electronics and medical device manufacturers, robot OEMs and integrators, and some of the world’s most prestigious R&D organizations.
Simplicity, Ease of Use
So where do Robotiq’s grippers fare in terms of ease of use and safety?
“The collaborative robots have done a pretty good job at having a simple interface where it’s easy to move the robot around,” says Bouchard.”You don’t have to get into complex programming and concepts. For us, that means we need to do as much as possible to make our products simple.”
“For example, we have a kit that comes with the UR. It’s everything you need to install it, the mechanical interface, all the cabling, and all the right controllers. You plug it in. Then you have a little USB key that you plug into the controller and it loads functions to open and close the gripper.”
Robotiq recently released a similar kit for the Baxter Research Robot, and they also have a kit for KUKA’s lightweight robot. The gripper runs on the same controller as the robot and it also shows up on the teach pendant interface.
Bouchard says the clamping force of the Robotiq grippers used on collaborative robots is not enough to hurt anyone. “Once the gripper has the part, it self-locks, so if you lose power or you have an emergency stop, the part stays within the gripper. As it is right now, the gripper was not designed with collaborative operation in mind, so it does have some sharp edges. People need to be aware of that. We’ll address this with upcoming product updates.”
Obviously, Bouchard sees a lot of promise in this human-robot collaborative realm and is betting on its imminent proliferation. He’s not alone.
This video demonstrates a novel application of a Robotiq 3-finger gripper, mounted on a KUKA lightweight arm, mounted on a mobile base. With three forward-looking technologies on board, “ANNIE” is the belle of the ball.
Collaborative Cruisers
She’s not alone, either. ANNIE has friends in aerospace and the EU project VALERI (Validation of Advanced, Collaborative Robotics for Industrial Applications).
As we noted early on, there is significant diversity in the cobot gene pool. Most AGVs, automated guided vehicles, are not considered robots by themselves. By ISO definition, industrial robots must have 3 or more axes.
But take a collaborative robot and mount it on a mobile base, where both are moving at the same time. Now you have a different animal. The entire mobile system becomes a collaborative robot intended to work in close proximity to humans. The safety standards community is still trying to catch up to these dynamic specimens.
The gene pool becomes more crowded when you consider other types of robots working in collaborative settings.
First Collaborative SCARA
Designed and manufactured by Precise Automation Inc. in San Jose, California, the PF400 is reported to be the first collaborative SCARA robot. According to Precise, what makes the robot collaborative is its inherently safe design, allowing for systems to be operated in bench-top laboratory applications without safety barriers.
 This lab-friendly SCARA was “collaborative” before the term was even hip.
This lab-friendly SCARA was “collaborative” before the term was even hip.
“We designed it around humans and made it easy to program and easy to use,” says Precise’s Program Manager Jim Shimano. “This was before the collaborative concept was really taking hold. When we first released the PF400 in early 2012, we called it bench-top safe.”
Hardly a newcomer on the block, Precise was founded more than 10 years ago by the same people that founded Adept Technology in 1983. The robotics roots run deep.
“When Precise first started, we looked at laboratory automation and life sciences as an underdeveloped market for robotics, and automation in general,” explains Shimano. “When we set out to develop the PF400, the life sciences market had a lot of systems similar to a SCARA that were handling microtiter well plates. But these systems were designed by analytical science equipment manufacturers, not robot guys.”
“We worked with a partner in the life sciences industry that was looking to develop a bench-top solution,” says Shimano. “It needed to be light, it needed to be safe. You have chemists and biologists working in close proximity to these robots.”
“Now we have more than 200, maybe close to 250, working in labs without safety shields in a completely collaborative environment.”
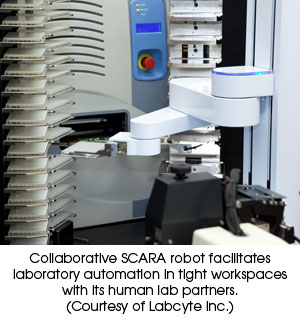
Yet you won’t see the PF400 out in the wild. The collaborative SCARA is sold to integrators and traditional robot OEMs that incorporate it into larger, high-end private-label equipment that they sell to their own customers. An example is the Labcyte Access™ Workstation shown in the photo.
This video demonstrates the PF400 collaborative SCARA robot in action in an integrated laboratory automation system called the PlateButler® by Lab Services.
“What’s unique about our robot is that it’s designed to be intrinsically safe,” explains Shimano. “The joints are extremely back-drivable, so you can move it away from you. It’s not going to exert many newtons when it hits something. And even when it does hit something, the power cuts out and it goes into a safety stop.”
He says the software uses special algorithms that are always limiting the amount of force and torque the robot can exert.
Power and Force Limiting Servos vs. Steppers
One of the advantages of the collaborative SCARA is its servo-driven design. Although standard issue in traditional industrial robots, this technology is harder to come by in lab automation.
“A lot of lab equipment is stepper-driven without any type of formal collision detection,” explains Shimano. “So imagine, you could spend months making a sample. All of your work is sitting there in a vial and you only have a milliliter of it. Just think how important it would be to you.”
Shimano says stepper systems have no feedback, so they are unable to determine if they’ve grasped a sample properly or not. He says this puts more than just the lab tech’s safety at risk. There’s also the safety of the equipment and the reliability of the samples.
Our Collaborative Future
The future of human-robot collaboration is a vast frontier. Researchers are learning that it helps to place the humans at the center of the universe. Two intensive research programs, one in Europe and the other in the U.S., are helping shape our collaborative space.
The SAPHARI program, for Safe and Autonomous Physical Human-Aware Robot Interaction, is a European consortium of research institutes, universities and corporate partners, 13 members in all, including the German Aerospace Center (DLR), Fraunhofer IOSB, EADS (Airbus Group), and KUKA.
Established in 2011, the four-year project is at the halfway point in its ongoing research into the mechanical, planning and control technologies for safe physical human-robot interaction (pHRI). The next phase of the project will apply selected results from this research to two case studies of coworkers in industrial applications, and one case study of professional service robotics.
 “Our final goal is to bring to fruition coworkers in real-world applications, by using the new technologies of soft robotics that combine cognitive reaction and safe physical human-robot interaction and collaboration,” says Alessandro De Luca, Project Coordinator for SAPHARI and a professor in the Department of Computer, Control and Management Engineering at Sapienza Universita di Roma in Italy.
“Our final goal is to bring to fruition coworkers in real-world applications, by using the new technologies of soft robotics that combine cognitive reaction and safe physical human-robot interaction and collaboration,” says Alessandro De Luca, Project Coordinator for SAPHARI and a professor in the Department of Computer, Control and Management Engineering at Sapienza Universita di Roma in Italy.
Human-Centric Design
SAPHARI represents a fundamental paradigm shift in robot development, placing the human at the center of the entire design. The research builds upon findings from the PHRIENDS program, in which De Luca was also involved. He explains the premise.
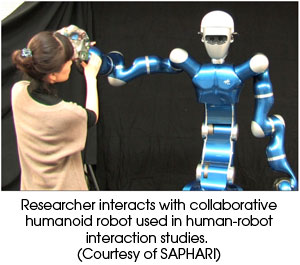
“Let the robot adapt to humans. We want to be able to distinguish between intentional contact and accidental collisions. The robot should recognize human gestures and motion intentions, with or without voice support in multimodal communication.”
This video summarizes some of SAPHARI’s research activities in physical human-robot collaboration (pHRC) in the DIAG Robotics Lab at Sapienza.
“We developed a general control architecture that is aimed at imposing consistent robot behaviors across hierarchical nested layers – Safety, Coexistence and Collaboration,” says De Luca.
The first layer, safety, is always present. In the next layer, coexistence, the robot should be able to recognize human motions and avoid contact in a shared workspace. Then automatically resume its operation as planned. In the final layer, the human indicates to the robot that he wants to collaborate (in SAPHARI’s experiments, they used a hand-waving gesture as seen in the video), and the robot obliges.
“Now, while it’s doing this, the robot doesn’t have to forget that coexistence and safety are still on,” says De Luca. “Coexistence means that the other part of the robot should not collide with the human. If that layer fails because the human makes a movement too fast to be tracked by the sensors, then the lowest level (safety) is still there to prevent an accident, or unintentional contact. The robot moves away from the area of the collision.”
What does this mean for real-world collaborative scenarios? In one of the program’s two industrial case studies, the setting is aircraft assembly (EADS).
“Although it’s a very large aircraft with a large workspace, it’s a very collaborative environment with humans working side by side with conventional robots,” says De Luca. “They are sharing the workspace, doing something in collaboration, or just working in parallel, so we have to guarantee safety at all times. This is critical.”
Both industrial use cases and a professional services surgical assistant case are illustrated in this SAPHARI presentation.
Variable Impedance Actuation
One of the most fascinating areas of SAPHARI’s research revolves around variable impedance actuators (VIA). According to De Luca, VIAs are destined to become the new standard for actuators.
“They achieve a safe and compliant behavior by quick mechanical accommodation, soft for absorbing hits, and stiff to transfer energy efficiently,” explains De Luca. “They are rigid when moving slow and soft when moving fast.”
De Luca says VIAs combine the advantages of variable stiffness and variable damping actuators for the best of both worlds.
“We’re not only concentrating on single actuators, but also trying to integrate multiple variable impedance actuators into a robot’s upper body or body structure.”
This video shows a humanoid robot consisting of crude variable impedance actuators performing a peg-in-hole experiment.
“I believe this will be the actuation of the next generation of robots,” says De Luca.
A continent away, researchers in the Department of Aeronautics and Astronautics at the Massachusetts Institute of Technology are helping us visualize the factory of the future.
Cross-Training the Human-Robot Team
Currently conducting research in MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL), the Interactive Robotics Group led by Professor Julie Shah has intriguing results from its experiments in human-robot interaction and the benefits of cross-training.
“Our current research is in manufacturing and how we can integrate robots to work with people on factory floors to build commercial airplanes, cars and consumer electronics,” says Shah. “The true opportunity lies in the non-value-added tasks. This includes movement of materials, set-up, placement, and configuring parts so that a person has less work to do or fewer movements to make. Much of that work can be done by robotics today. But a large proportion of the work is still manual and composed of these non-value-added tasks.”
Shah’s expertise is a blend of artificial intelligence, algorithms development, and human factors engineering. Prior to joining MIT’s faculty, she worked with Boeing Research & Technology on robotics applications for aerospace manufacturing.
 “One of the challenges has been that the robots and the people in these scenarios are often kept separate,” explains Shah. “What’s exciting is that this paradigm is changing and our factories of the near future are going to look very different. The challenge is how to program these robotic systems in very dynamic environments where they are working closely with people, and how to program them to work in teams.”
“One of the challenges has been that the robots and the people in these scenarios are often kept separate,” explains Shah. “What’s exciting is that this paradigm is changing and our factories of the near future are going to look very different. The challenge is how to program these robotic systems in very dynamic environments where they are working closely with people, and how to program them to work in teams.”
“We observed that the typical techniques we use for training robots look nothing like the effective techniques for training human teams,” says Shah. “Instead, the techniques for training robots resemble how we train systems that work independently from people, or that only require one-way transfer of information from a person to a machine.”
You could liken the approach to how we might train a dog. Fido gets a reward when he performs a trick properly. Shah says this type of reinforcement learning doesn’t work that well for training human teams or robot teams.
“The teamwork is fundamentally different in that it requires interdependent actions between multiple agents,” explains Shah. “It’s not enough to just tell someone how to do the task properly. You actually have to perform the task and practice it, and refine to find an execution sequence that flows for the team. It’s not just about knowledge transfer.”
“You see better results if you actually take someone else’s job for a little while,” says Shah. “It helps you internalize how to not only perform your job effectively, but also change how you perform your job to make your teammate more effective.”
“We designed our experiments around this hypothesis. We took algorithms and reinforcement learning and we modified them, so instead of taking the input through positive and negative reward, the robot took its input by switching roles with a virtual person in a virtual environment,” explains Shah. “The robot would do the person’s role, and the person would do the robot’s role.”
“By redesigning the training process so that it looks more like human team training processes, we were able to see both objective and subjective measures of benefit. But, arguably, what was even more important is that people trusted the robot more. They thought the robot performed their work according to their preference.”
This video shows MIT’s cross-training experiments. A person wearing a LED motion-tracking glove works with ABB’s dual-arm concept robot (DACR) and single-arm articulated robot in both virtual and lab environments.
“There’s enormous excitement around this area and optimism that this technology can significantly enhance efficiency and productivity of what has traditionally been manual work.”
Shah describes the study in more detail in this MIT TechTV video.
Better Together
“The key is to understand that this technology is not about replacing people,” says Shah. “It’s about harnessing the strengths of humans and robots to achieve new levels of efficiency and productivity that neither can achieve alone. It provides us with the opportunity to think about how to design new types of factories and new types of processes that incorporate this new technology.”
This cuts to the crux of what human-robot collaboration is all about. Humans and robots, independently superior in certain capabilities, but infinitely better together.
RIA Members featured in this article:
KUKA Robotics Corporation
Precise Automation Inc.
Rethink Robotics Inc.
Robotiq
Universal Robots
Yaskawa Motoman
Robotic Industries Association
RIA has transformed into the Association for Advancing Automation, the leading global automation trade association of the robotics, machine vision, motion control, and industrial AI industries.
Discover how Robotic Industries Association can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteRobotic Industries Association 
RIA has transformed into the Association for Advancing Automation, the leading global automation trade association of the robotics, machine vision, motion control, and industrial AI industries.