Industry Insights
Robots in Medical Applications: How LOSTPED and Cartesian Robots Can Help
 From packaging and material handling to semiconductor fabrication and automotive assembly, virtually all manufacturing processes incorporate some type of linear motion, and as manufacturers become familiar with the flexibility and simplicity of modular linear motion systems, these systems—whether one, two or complete three-axis Cartesian robotics systems—are finding their way into more and more industries. The medical industry in its broadest scope, from laboratories to medical device manufacturing to dental equipment, has also begun to take advantage of the benefits unique to this style of robot to achieve higher throughput rates, lower costs, and reduced waste.
From packaging and material handling to semiconductor fabrication and automotive assembly, virtually all manufacturing processes incorporate some type of linear motion, and as manufacturers become familiar with the flexibility and simplicity of modular linear motion systems, these systems—whether one, two or complete three-axis Cartesian robotics systems—are finding their way into more and more industries. The medical industry in its broadest scope, from laboratories to medical device manufacturing to dental equipment, has also begun to take advantage of the benefits unique to this style of robot to achieve higher throughput rates, lower costs, and reduced waste.
In the rush to improve processes and cut costs, however, engineers and designers sometimes overlook critical application requirements when selecting linear motion or robotics components for the final manufacturing system. This can lead to costly redesigns and re-works in the worst case, but may also result in an overengineered system that is more costly and less effective than desired. Manufacturing and laboratory engineers also have to decide which type of robot to use: SCARA, 6-axis, Cartesian? With so many possible solutions, it’s easy to become overwhelmed when tasked with automating critical processes. Indeed, how do you even know that automating is the right approach?
The application engineers at my company have developed a method which helps them provide the best possible advice to customers considering linear motion or robotics systems by considering all of the factors involved in the application: How much load will the system need to handle? How fast will it need to move? What is the most cost-effective design? The key to success: “LOSTPED”—a simple acronym that can guide the engineer or designer in gathering the information needed to specify the appropriate linear motion components or modules in any given application. And while we use it primarily to help people build the right Cartesian robotics systems with linear modules, the acronym is also useful in determining which type of robot to choose, or whether even to choose automation at all.
What Is LOSTPED?
LOSTPED is an acronym that stands for Load, Orientation, Speed, Travel, Precision, Environment and Duty cycle. Each letter of the LOSTPED acronym represents one factor that must be considered when sizing and selecting a linear motion system. Rexroth engineers have determined that each factor must be considered individually as well as in conjunction with the others to ensure the best overall system performance. For example, the load imposes different demands on the bearing system during acceleration and deceleration than during constant speed movements. As more robotics solutions move from individual components to complete linear module, Cartesian systems, or SCARA robots, the interactions between system components—linear bearing guides and ball screw, belt, or linear motor drives—become more complex, and designing the right system becomes more challenging. The LOSTPED acronym can help designers avoid mistakes by simply reminding them to consider all of the interrelated factors during system development and specification.
Using LOSTPED in Medical Applications: How it can help you select and implement the most appropriate robotics system
The best way to approach LOSTPED is to work our way through each of the LOSTPED criteria, paying attention to the special considerations in medical applications. Below are descriptions of each LOSTPED factor, as well as key questions to ask when determining the criteria to size and select a linear motion or robotics system.
Load:
Load refers to the weight or force applied to the system. All linear motion or robotics systems encounter some type of load, such as downward forces in material handling applications or thrust loads in drilling, pressing or screwdriving applications. Indeed, any of these could occur in medical device assembly or medical packaging operations. Other types of applications are defined by varying loads, such as a medical dispensing, in which a reagent is deposited in a series of pipettes one after another, resulting in a lighter load at each step. Compared to heavy-duty automotive operations such as engine block handling, though, most medical applications involve lighter loads that can be handled easily by any of the three main styles of robots: SCARA, 6-axis or Cartesian. However, some specific medical devices, such as patient beds, require much higher load capacities. Linear modules may be used inside medical devices like these to provide the necessary load capacity and stiffness for smooth and safe operation.
Key questions to ask:
What is the source of the load and how is it oriented?
Are there special handling considerations?
How much weight or force must be managed?
Is the force a downward force, lift-off force or side force?
While considering load, it’s also worth taking a look at what type of tool will be at the end of the arm to pick up or carry the load. Although not specifically related to load, mistakes here can be costly. For example, if a highly sensitive work piece is picked up in a pick-and-place application, it may be damaged if the wrong type of gripper is used. So although it’s highly unlikely that a designer would forget to consider general system load requirements, he or she may indeed forget to consider certain aspects of those requirements. LOSTPED is a way to ensure completeness.
Orientation:
The orientation, or relative position or direction in which the force is applied, is also important, but is often overlooked. Since we are talking about the spatial positioning of something at the end of a robot arm, it’s critical to consider how to optimize the use of the area. Obviously, human workers can position items anywhere within a given space, but may not be able to achieve predictable precision (the “P” in LOSTPED). Among automated systems, 6-axis robots provide perhaps the most flexibility within their work envelope, and can use all of the space in any direction with the exception of the area occupied by the pedestal base. Cartesian robotics systems constructed from individual actuators, however, can be built to use the space exactly as the application needs.
Some types of linear modules or actuators can handle higher downward/upward loading than side loading, because of the linear guide system used in the module design. Other modules, using different linear guides, can handle the same loads in all directions. The Rexroth Compact Module CKK, for example, uses a dual Ball Rail System for guidance and is called upon frequently in applications requiring side-mounted, or axial loads. This may be especially useful in Cartesian or gantry robots used in drug discovery, for example, in which an upside down or sideways orientation of the modules helps protect the work materials (reagents, wells, etc.) against contamination that could be created by the moving mechanical components. Since most high-quality linear motion suppliers make modules and actuators to handle various situations, it’s important to make sure that the modules specified can handle the load requirements in the orientation needed to achieve success in the application. In processes requiring FDA approval, simple considerations like this can make all the difference.
Key questions to ask:
Is there a preferred orientation for the robotic positioning system?
Is it horizontal, vertical or upside down?
If a Cartesian system is used, where is the load oriented relative to the linear modules?
Will the load cause a roll or pitch moment on the linear module?
Speed:
Speed and acceleration also affect the selection of a robotics system. Cartesian and gantry robots have speed capabilities that rival those of articulated (or 6-axis) robots and much higher than SCARA robots. Speed is a highly critical consideration, since increased throughput is typically the reason a company decides to automate a process. High speed, combined with high stiffness and settling time, makes Cartesian or gantry systems ideal for High Throughput Screening applications.
It’s also worth considering that an applied load creates far different forces on the system during acceleration and deceleration than it does during a constant speed movement. The type of move profile— trapezoidal or triangular—must also be considered, as the acceleration required to meet the desired speed or cycle time will be determined by the type of move required. (A trapezoidal move profile means that the load accelerates quickly, moves at relatively constant speed for a period of time, then slows down. A triangular move profile means that the load accelerates and decelerates quickly, as in point to point pick-up and drop-off applications.) With linear modules and Cartesian systems, speed and acceleration are also critical factors in determining the appropriate linear drive, which is typically a ball screw, a belt, or a linear motor.
Key questions to ask:
What speed or cycle time must be achieved?
Is it a constant speed or variable speed?
How will the load affect acceleration and deceleration?
Is the move profile trapezoidal or triangular?
Which linear drive will best address the speed and acceleration needs?
Travel:
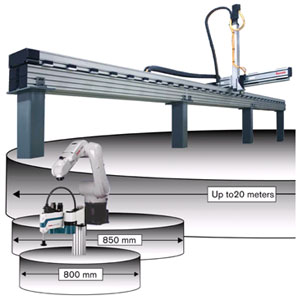
Travel refers to the distance or range of motion. Length of travel is one of the main benefits of a module-based Cartesian or gantry system, because modules can be purchased in lengths up to 20 meters. SCARA and articulated robots typically offer strokes of one meter or less, with the exception of massive 6-axis robots used in super heavy automotive applications. The long lengths possible with module-based systems makes them ideal for linear dispensing applications in which blood or liquid pharmaceuticals are added to test tubes or bottles arranged in a long row.
Key questions to ask:
What is the distance or range of motion?
Is it necessary to plan in overtravel in case of an emergency stop?
How much overtravel is needed?
Precision:
Precision is a broad term that is often used to define either travel accuracy (how the system behaves while moving from point A to point B), or positioning accuracy (how closely the system reaches the target position). It can also refer to repeatability, or how well the system moves back to the same position at the end of each stroke. Each type of robot may offer different performance characteristics for each type of precision. For example, continuously smooth transfer at a moderate speed may be preferable for sensitive components than jerky, high-speed transfer. Understanding the difference between these three terms – travel accuracy, positioning accuracy, and repeatability – is often critical to ensuring the system meets the performance specifications. High-throughput screening (HTS) is a good example of an application that requires high-precision positioning of devices to ensure accurate pipetting and liquid handling.
With linear module-based systems, the main reason to think through the precision requirements is drive-mechanism selection. Belt drive, ball screw or linear motor? Each type offers trade-offs between precision, speed, and load-carrying capacity, and the best choice is dictated mostly by the application.
Key questions to ask:
How important are travel accuracy, positioning accuracy, and repeatability in the application?
Is precision more important than speed or other LOSTPED factors?
Environment:
Environment refers to the surrounding conditions in which the system will be expected to operate. For example, extreme temperatures can affect the performance of plastic components and lubrication within the system, while dirt, liquids, and other contaminants can cause damage to the bearing raceways and load carrying elements. In a medical or laboratory environment, it may be necessary to test the effect of certain chemicals on the robotic system to ensure that no damage will occur if these substances are inadvertently splashed. Cartesian systems can be easily customized to withstand a wide range of environments, from specially plated components to combat rust to special coatings to protect from chemical splash and vapors.
Indeed, environment is an often-overlooked performance factor, but one that can greatly influence the overall success of the application. Options such as special lubrication and positive air pressure in Cartesian and gantry systems, for example, allows them to achieve cleanroom class 10 certification, thereby reducing or eliminating the risk of sample contamination by the mechanical system.
Key questions to ask:
What types of hazards or contaminants are present—extreme temperatures, dirt, dust, liquids, etc.?
In the opposite case, is the linear motion system a potential source of contaminants for the environment (ESD, lubricants or particulate)?
Duty Cycle
Duty cycle is the amount of time it takes to complete a cycle of operation. In all linear actuators, the internal components will generally determine the life of the final system. Bearing life inside a module, for example, is directly affected by the applied load, but is also affected by the duty cycle that the bearing will experience. A robotics system may be capable of meeting the previous six factors as determined by the application, but if it runs continuously 24 hours a day, seven days a week, it will reach the end of its life much sooner than if it runs only eight hours a day, five days a week. In addition, the amount of in-use time versus rest time influences heat build-up inside the linear motion system and directly impacts system life and cost of ownership. Clarifying these issues in advance can save time and aggravation later, since wear parts such as belts can be easily stocked for rapid replacement. High-throughput screening and pharmaceutical manufacturing typically require 24/7 duty cycles, so it’s important to look for systems that have long lube intervals and low maintenance requirements.
Key questions to ask:
How often is the system in use, including any dwell time between strokes or moves?
How long does the system need to last?
Some Final Advice
While LOSTPED provides seven basic factors and key questions to ask when sizing and selecting a linear motion system, for best results designers should consult a reputable distributor or the manufacturer’s application engineering department. They have typically had exposure to hundreds of applications, and possibly several dozen very similar to the application at hand. Factory experts may even be able to steer you to a system integrator with special expertise in medical applications. As a result, they may be able to save substantial time and make cost-saving recommendations by anticipating potential problems and considering any special requirements of the particular application or industry in question. After all, the end objective is to get the best motion system possible with the lowest cost of ownership. Skilled application engineers familiar with LOSTPED can make sure their customers get just that.
Bosch Rexroth Corporation is an RIA Supplier Member. For additional information, please contact Bosch Rexroth Corporation, Charlotte, North Carolina, at (800) REXROTH (739-7684), or visit www.boschrexroth-us.com.
Bosch Rexroth Corporation
Bosch Rexroth's factory automation portfolio includes TS conveyor systems, VarioFlow plus plastic chain conveyor, aluminum framing, engineering design software, linear motion solutions, our ctrlX AUTOMATION platform, and more!
Discover how Bosch Rexroth Corporation can support your automation journey with their complete range of solutions and expertise.
Visit Company Website

Bosch Rexroth's factory automation portfolio includes TS conveyor systems, VarioFlow plus plastic chain conveyor, aluminum framing, engineering design software, linear motion solutions, our ctrlX AUTOMATION platform, and more!