Industry Insights
New Models Simulate Gravity’s Impact on Sand to Help Unstick Space Rovers
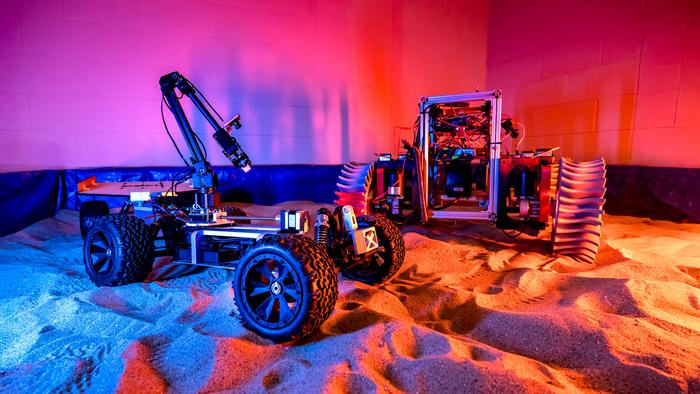
It’s hard to imagine the frustration of launching an extremely expensive remote-controlled robot into space, only to get it stuck in a big, red sand dune a couple hundred million miles away.
Regardless of distance, however, it’s important to channel that energy in the right direction. In the case of getting a wheeled craft stuck on a distant planet, the answer may be to focus on the sand, rather than the rover. Turns out gravity has a significantly stronger hold on the stuff here on Earth.
Using data collected from Project Chrono, an in-house, open-source physics simulator, University of Wisconsin Madison researchers believe they have discovered why past missions have been “overly optimistic” with regard to the behavior of lightweight rovers beyond our atmosphere.
ROI Calculator

Discover the potential cost savings of robotic automation over a 20-year system life
This calculator compares your current manual labor costs against the total cost of owning and operating a robotic system over its 20-year lifespan.
“In retrospect, the idea is simple,” says UW mechanical engineering professor, Dan Negrut. “We need to consider not only the gravitational pull on the rover but also the effect of gravity on the sand to get a better picture of how the rover will perform on the moon. Our findings underscore the value of using physics-based simulation to analyze rover mobility on granular soil.”
The significantly heavier and coarser Earth stand has a much tighter grip on wheels than the lunar or Martian variety. In this case, a tighter grip means tighter traction, allowing for greater control and mobility.
The team believes the simulator and findings can help better prepare NASA for the inevitability of stuck rovers.
Association for Advancing Automation
Discover how Association for Advancing Automation can support your automation journey with their complete range of solutions and expertise.
Visit Company Website



PickNik Robotics Wins Space Force Contract for On-Orbit Capture, and NASA Contract for Machine Learning in Space
PickNik Robotics, a leader in robotics software and engineering services, announced it has won a Space Force contract, NASA contract and Colorado AI gran
Mars Rovers Touch Down in Lucerne
maxon motors enters a partnership with the Swiss Museum of Transport.
maxon drives are heading to the Red Planet with NASA’s Perseverance rover
In July, NASA will be sending its fifth rover to Mars.