Performance Motion Devices Product
Member Since 2018
Performance Motion Devices’ technology controls more than six million motors worldwide. We provide reliable multi-axis motion solutions and unparalleled technical support such as; motor set-up and tuning, motion board design, electrical schematic review and custom software/hardware development services. Performance Motion Devices offer a full line of intelligent ICs, modules, digital drives, and boards, plus easy-to-use software which will bring your system to life quickly. Our intuitive development tools and common motion architecture make design, development, and validation of your motion system fast, predictable and low-risk. Performance Motion Devices’ ensemble of industry-leading customers provide us with extensive experience across a wide range of applications. Need for the best way to control motion for a multi-axis application? Let us show you how we can help.
Product filed under:
Control Components, Control IC's, and Control IC's and CPU's Control Components, Control IC's, Control IC's and CPU's, Controls, Drives & Amplifiers, Drives & Amplifiers Components, Motor Controls, Motors, Motors & Drives, PC Boards for Drives & Amplifiers, Servo Motors, and Software & AI
See More
Low Cost ICs Provide Advanced Velocity Control of Servo Motors
Model: MC71113, MC73113, MC78113
The Juno MC71113, MC73113, and MC78113 are newly released ICs that provide advanced velocity control of 3-phase Brushless DC and DC Brush motors with features such as PI (proportional, integral) velocity loop control, programmable velocity estimation, dual biquad filtering, shunt regulation, deadband filtering, FOC (Field Oriented Control), and more.
These ICs are the latest additions to PMD's Juno family of velocity and torque control ICs and are ideal for a wide variety of applications including spindle control, centrifuges, peristaltic pumps, laboratory automation, packaging automation and more. These ICs are available in a 64-pin TQFP package measuring 12x12 mm. All Juno Velocity Control ICs are available immediately and are priced from $23 depending on motor type controlled and quantity.
Available Configurations
Juno Velocity Control ICs are single-axis devices for velocity control of three-phase Brushless DC motors and DC Brush motors. Three IC options are offered as shown in the table below:
|
Part Number |
Motor Type |
Package |
Dimensions |
|
DC Brush |
64-pin TQFP |
12 x 12 mm |
|
|
Brushless DC |
64-pin TQFP |
12 x 12 mm |
|
|
DC Brush or Brushless DC (user programmable) |
64-pin TQFP |
12 x 12 mm |
Functional Overview
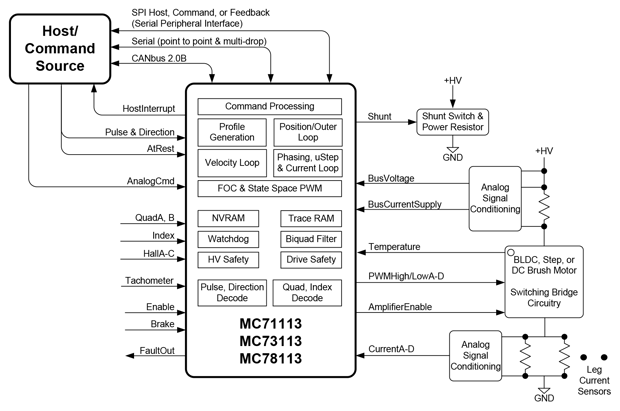
Figure 1: Juno Velocity Control ICs Diagram
At power-up or reset Juno checks for the presence of stored configuration commands in its NVRAM. If NVRAM is programmed, the stored configuration commands are read into the chip, providing parameter information that will be used during operation.
If no initial configuration is stored in NVRAM, then default values are used and information will then be sent by a host device such as a microprocessor. Available host interfaces include Asynchronous serial (point to point & multi-drop), SPI (Serial Peripheral Interface), and CANbus 2.0.
Depending on how the control loop has been configured an external analog signal may serve as the velocity command value, an SPI (Serial Peripheral Interface) data stream may be used for this command value, or pulse & direction signals may provide a position command datastream. Alternatively, a profile generator commanded by a host microprocessor may be used to generate velocity command values, or velocity commands may be sent directly by this host microprocessor.
Juno provides an advanced PI loop for the velocity control function. The velocity loop receives commands directly from analog or digital SPI circuitry or from the profile generator. The measured velocity may come from a quadrature encoder, Hall sensors, or tachometer feedback. In addition to the velocity loop controller, Juno ICs provide dual biquad filters and a deadband filter allowing a very wide range of precision velocity control applications to be addressed.
Current control is performed via direct input of analog signals containing the instantaneous current through the motor coils. These signals are typically derived from external dropping resistors or Hall sensors at the amplifier circuitry. This analog current information is then combined with the desired current for each phase to generate PWM signals.
To create a complete velocity controller Juno is connected to switching amplifiers, typically MOSFET or IGBT-based. A programmable dead time function and other timing and current sense control parameters ensure that switch synchronization and current control is optimal over the entire operating range of the driven motor.
A number of safety features are incorporated into the Juno ICs including shunt control, I2t current limiting, brake signal input, DC bus overvoltage and undervoltage detect, overcurrent detect, and overtemperature detect.
To learn more about Typical Applications, Key Features, and Configurations, visit our Juno Velocity Control IC feature article.

