News
Quadruped Robot - Mechanical Structure
I. Leg Types of Quadruped Robots:
1. Parallel Leg:
Advantages: Parallel legs are more flexible and have better force angles compared to series legs.
2. Series Leg:
Advantages: Series legs have a larger range of motion.

3. Leg Layout (Joint Configuration):
In order to achieve better stability, quadruped robots generally have a lower center of gravity. This means that the hip joints of the robot legs need to be positioned on the sides of the robot body rather than the abdomen. Combining the different knee joint orientations of the 2-link leg structure, there are four configurations: front knee, rear elbow; front elbow, rear knee; full knee; and full elbow.
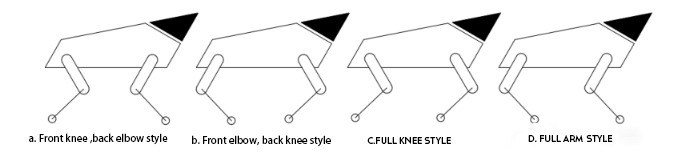
The front knee, rear elbow configuration has a small lateral offset distance, and the joint configuration has the smallest fluctuation range and amount.
The full knee configuration has the furthest maximum distance of movement in the forward direction and is relatively simple in design and control.
II. Foot Design of Quadruped Robots:
There are three main forms of foot design for quadruped robots: cylindrical foot (including semi-cylindrical), spherical foot (including semi-spherical), and biomimetic foot.
The cylindrical foot is the most common design for quadruped robots. The foot is spherical or semi-spherical, and its advantage is that the robot foot can make contact with the ground from various directions, making it highly adaptable to the environment.
III. Knee Joint Actuation of Quadruped Robots:
1. Belt Pulley Drive:
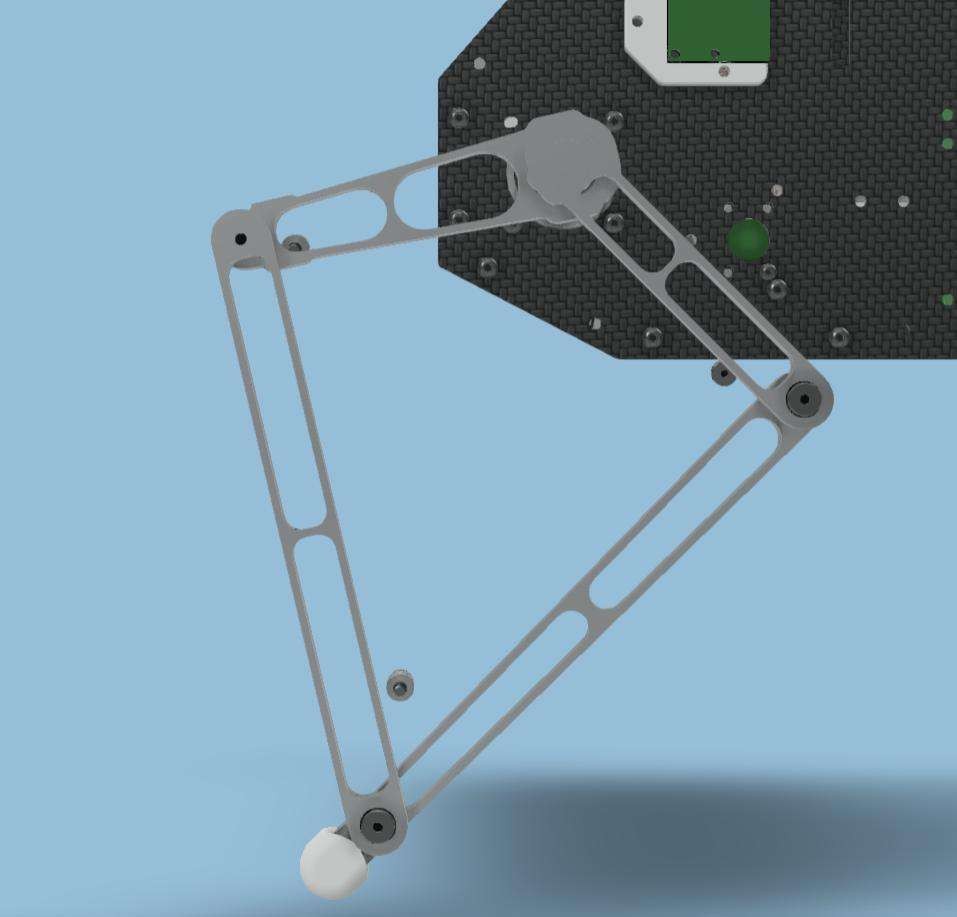
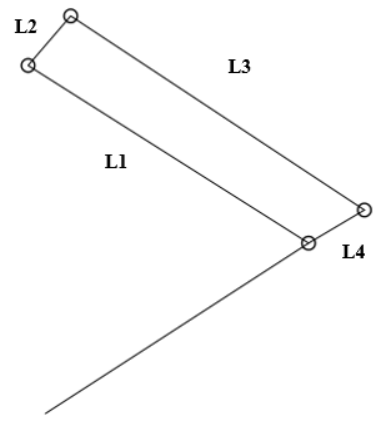
2. Four-bar Linkage or Push Rod Drive:
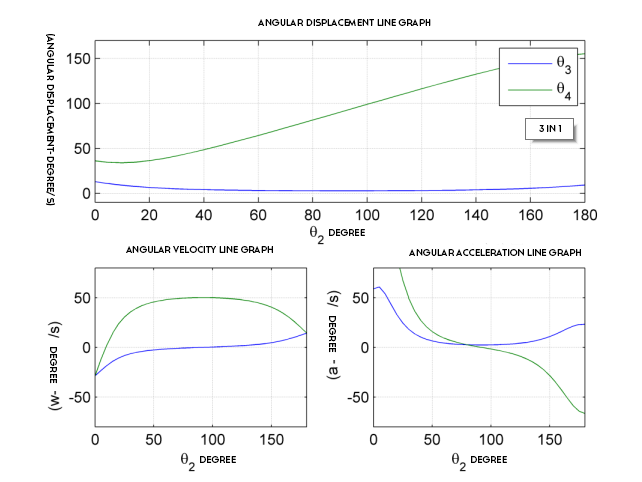
Using a linkage drive introduces a transmission relationship. By analyzing the drive of the four-bar linkage based on mechanical principles, the mapping relationship between knee joint rotation angle and reducer output angle can be obtained. The specific calculation method is as follows:

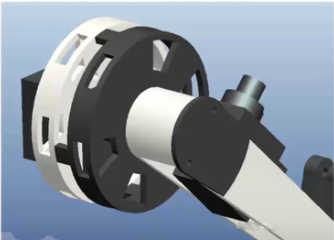
IV. Detailed Design of the Overall Mechanical Structure of Quadruped Robots:
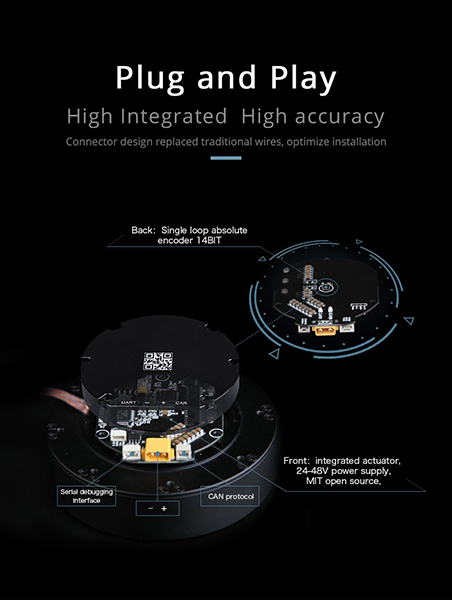
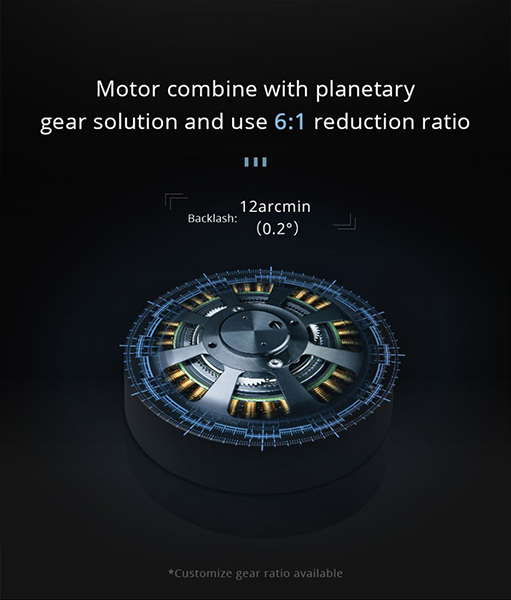
CubeMars AK80-6:
V. Regarding more motor models or browsing the CubeMars official website.
OFFICIAL WEBSITE: www.cubemars.com
Nanchang Kude Intelligent Technology Co., Ltd.
CubeMars provides reliable robotic motors for humanoids & automation
Discover how Nanchang Kude Intelligent Technology Co., Ltd. can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteNanchang Kude Intelligent Technology Co., Ltd. 
CubeMars provides reliable robotic motors for humanoids & automation
CIMTEC Automation LLC Selected as Mobile Industrial Robots (MiR) Distribution Partner for NC, SC, VA in North America
CIMTEC Automation announces latest partnership in the industrial robotics arena with MiR, a leading manufacturer of collaborative mobile robots.

Weekly Bot Brief Newsletter on Robotics 2/1/2019
Hindered by the 15.25% slide in shares of Cyberdyne this week, the Bot Brief’s five weeks of outperformance...