Industry Insights
Goin’ Mobile
Motion control provides big boost to the disabled.
The average able-bodied individual walks from 3000-4000 steps per day. For many people with disabilities, that mobility is precisely what they’ve lost. Around the globe, engineers are using motion control to help bring their mobility back. Active prosthetic limbs allow amputees to move more naturally and easily, for example, and robotic wheelchairs hold out the prospect of augmented upper-and lower-body activity. For people with disabilities, electromechanical technology offers enhanced safety, independence, and quality of life.
 From the engineering standpoint, however, building these types of devices presents a range of challenge. Biological systems have a way of making ridiculously complicated problems appear simple. Designers of mobility solutions must conquer issues like thermal management, noise control, punishingly small form factors, wickedly complex controls problems, and above all, stringent safety requirements. Let’s take a closer look at how two groups are conquering those challenges.
From the engineering standpoint, however, building these types of devices presents a range of challenge. Biological systems have a way of making ridiculously complicated problems appear simple. Designers of mobility solutions must conquer issues like thermal management, noise control, punishingly small form factors, wickedly complex controls problems, and above all, stringent safety requirements. Let’s take a closer look at how two groups are conquering those challenges.
Step On It
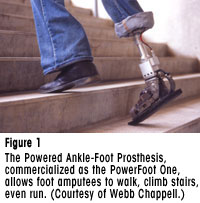
At last count, roughly 1 in 150 Americans has a major limb amputation. The earliest prosthetic feet were simply wooden models of the human limb that provided support. Later iterations featured hinges to ease the walking process. Led by Hugh Herr, the Biomechatronics Group of the Massachusetts Institute of Technology Media Lab has developed a state-of-the-art Powered Ankle-Foot Prosthesis that adds energy into the stride, enormously increasing efficiency and improving the ability of people with lower limb amputations to walk up stairs and inclines, for example (see Figure 1).
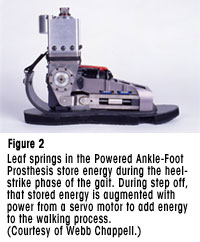 During the process of taking a step, the lower body can be thought of as a series of interlocking biological springs and pendulums that transfer energy from one joint to the next during the process to yield a highly efficient stride. In the Powered Ankle, a series of springs stores energy gathered during the heel-strike portion of the stride and releases it during the next step, augmented by power from a servo motor (see Figure 2). This spring-motor combination, which team member and graduate researcher Grant Elliott refers to as a series elastic actuator, acts like a catapult, allowing them to replace a high-impulse-power motor with a smaller, low-average-power device. The approach reduces cost and size while increasing battery life.
During the process of taking a step, the lower body can be thought of as a series of interlocking biological springs and pendulums that transfer energy from one joint to the next during the process to yield a highly efficient stride. In the Powered Ankle, a series of springs stores energy gathered during the heel-strike portion of the stride and releases it during the next step, augmented by power from a servo motor (see Figure 2). This spring-motor combination, which team member and graduate researcher Grant Elliott refers to as a series elastic actuator, acts like a catapult, allowing them to replace a high-impulse-power motor with a smaller, low-average-power device. The approach reduces cost and size while increasing battery life.
In engineering, you never get something for nothing. The trade-off to the advantages of incorporating springs in the design is that it presents a fiercely complex controls challenge. The group developed a control architecture based on virtual impedance. “We think of the motor as a dynamic spring that doesn't have to obey zero net energy,” says Elliott. “The impedance can vary in a loop that causes an adjustable energy contribution. In gaits like running, we a step as transitioning rapidly between two impedances as you roll over the foot.”
To a certain extent, the timescales involved mitigate the challenge of the control problem. Walking, for example, takes place at a rate of a few hertz. “If the output bandwidth of your controller is on the order of 100 or 200 Hz, you're probably okay,” says Elliott. “That really means that you're looking at feedback loops operating at maybe 1 KHz.” The speed of microcontroller used on most of the lab’s prosthetic devices runs at 16 MHz, which leaves a computational cushion for unexpected problems.
 Because of the nature of the problem, the team avoided using intelligent components in favor of working with standard components backed by microprocessors and sophisticated software. “In the prototyping stages, I've found it's much easier to do everything with ‘dumb’ parts so that you know what's happening,” says Elliott. “I can't tell you how many times I've looked at almost any kind of dedicated motion control chip and said, ‘Boy, that seems like it would make my life easier,’ but our problems are so elaborate that it's almost easier to do it yourself.” The controller for the Powered Ankle consists of a stack of three 0.5-in. x 2-in. boards and a 30-mm-diameter, 68-mm-long brushless motor with integrated encoder gives a peak output torque at the ankle of nearly 200Nm.
Because of the nature of the problem, the team avoided using intelligent components in favor of working with standard components backed by microprocessors and sophisticated software. “In the prototyping stages, I've found it's much easier to do everything with ‘dumb’ parts so that you know what's happening,” says Elliott. “I can't tell you how many times I've looked at almost any kind of dedicated motion control chip and said, ‘Boy, that seems like it would make my life easier,’ but our problems are so elaborate that it's almost easier to do it yourself.” The controller for the Powered Ankle consists of a stack of three 0.5-in. x 2-in. boards and a 30-mm-diameter, 68-mm-long brushless motor with integrated encoder gives a peak output torque at the ankle of nearly 200Nm.
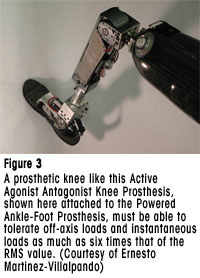
If possible, the constraints imposed by prosthetic applications are even more stringent than those presented by the general medical device market. Even something as seemingly simple as a bearing can be a showstopper. An industrial bearing may be able to handle an appreciable in-line load, but person using a powered knee and ankle prosthetic may apply off-axis loads (see Figure 3). During a running step, the instantaneous loads on a bearing at the knee, for example, may be four to six times that of the RMS value. Brawn can’t necessarily provide the answer because of form factor limitations.
The size of a prosthetic can make or break its usefulness. The Powered Ankle, for example, has to be short enough that the majority of amputees will be able to use it. That would seem to argue for orienting the motor horizontally, but here too, form factor comes into play. “If you put the motor horizontally, you wind up with something a little bit thicker than a human foot, which isn’t a problem until you have to put on dress shoes,” says Elliott. As in most types of engineering, the process involves a series of trade-offs to develop a prosthetic that can be most useful to the greatest number of people. “Orienting the motor vertically makes the device a little bit taller, which unfortunately means that a certain population of people who have very low amputations will not to be able to use it.”
 Audible noise is another concern. For every young, hip amputee who doesn’t mind sounding like the Terminator, there is another who wants the prosthetic to look and operate as much like a human limb as possible, which means minimizing servo whine. The team started by using standard techniques such as tuning the servo motors and the control loops. For the actuators, they turned to a more exotic solution - a custom ball screw featuring vibration-minimizing mounting points and a hollow titanium screw filled with a damping material.
Audible noise is another concern. For every young, hip amputee who doesn’t mind sounding like the Terminator, there is another who wants the prosthetic to look and operate as much like a human limb as possible, which means minimizing servo whine. The team started by using standard techniques such as tuning the servo motors and the control loops. For the actuators, they turned to a more exotic solution - a custom ball screw featuring vibration-minimizing mounting points and a hollow titanium screw filled with a damping material.
The most recent iteration of the Powered Ankle actually weighs less than the human foot it would replace and is designed to tolerate up to 4000 steps per day. The technology has been commercialized by iWalk as the PowerFoot One; see their website for further information.
Give ‘Em A Hand
Of course, mobility is only half the battle. In the case of traumatic spinal injury, stroke, or debilitating diseases, people can experience impaired function in the hands and arms as well as the legs. At the Human Engineering Research Laboratories (HERL), a team led by Department of Veterans Affairs Senior Career Scientist and University of Pittsburgh professor Rory Cooper has developed the Personal Mobility and Manipulation Appliance (PerMMA). The PerMMA is essentially a motorized wheelchair with robotic arms (see Figure 4). Sitting in the device, a person can travel to the location of their choice and use the arms to do everything from pick an item off the store shelf to hang up a towel in the bathroom. The arms attach to a carriage at the back of the wheelchair and the chair seat can move up by as much as 1 foot.
To address the control challenge of providing sophisticated functionality to users who may not be techno-savvy enough to work with a standard HMI, the system can operate on a combination of local and remote control modes (see Figure 5). The local user could drive the wheelchair base to the refrigerator, for example, then depending on their skills, either direct the robot arm to retrieve a soda or ask the remote assistant to command the motion for them via Internet.
 The remote assistant can access data from sensors and electronic imagers, as well as a haptic robot that allows them to get a feel for the situation - literally. "The approach has allowed us to be efficient in unstructured environments where other robots have problems," says Cooper.
The remote assistant can access data from sensors and electronic imagers, as well as a haptic robot that allows them to get a feel for the situation - literally. "The approach has allowed us to be efficient in unstructured environments where other robots have problems," says Cooper.
To ensure safety and eliminate common-mode failure, the unit features a variety of sensors, including encoders, gyroscopes, force sensors, and temperature sensors. Here again, the application provides some interesting constraints. Temperature monitoring is crucial. The system uses thermal mapping to prevent the robotic gripper from being burned by contact with the side of a hot oven, for example - or to avoid burning the user with hot metal after the arm is retracted. The thermal sensors in the gripper also facilitate conditional path planning. Passing a t-shirt over the body of the user may not present a safety risk but moving a pan of boiling water on that same trajectory would. The system monitors the temperature of objects to ensure that the robot arms take the correct path.
The team began with a detailed, model-based control architecture but quickly realized that real-world conditions made that approach too computationally intensive. To reduce processor demands, they simplified their model and distributed computing and communications demands by leveraging smart components like encoders with onboard processors. The result is a system that offers a surprising degree of sophistication, including anti-tipping capabilities; the group is also working on algorithms for all-season traction control.
The robot arms can support a payload of 6 kg each, or a bit less than 12 kg in tandem. A 3600-rpm motor housed in the base of the wheelchair powers the arms using belt drives. Belt slip, Cooper says, is rarely a problem, in part because the controller avoids vertical lift situations. If belt slip does introduce an error, either the local or the remote user can compensate for it. An additional 1800-rpm motor with gearbox powers the wheels of the chair.
To tackle the issue of audible noise, the designers focused on motor and gearbox alignment. "[Servo motor noise] is actually not bad when you're driving," says Cooper. "There's more of a servo whine when you're trying to hold it in position. We deal with that by using a large gear ratio. It does a pretty good job of holding it in place just by internal friction."
The unit is still in the R&D stage but the goal is eventual commercialization. Although the PerMMA currently costs around $200,000, Cooper estimates that the economies of scale provided by volume production could drive that price as low as $50,000.
As engineering and motion control capabilities increase, they offer ever more sophisticated mobility solutions. The benefits go far beyond the practicality of motion - by bringing ease of use and independence, such systems can change lives.
Motion Control & Motor Association
The Motion Control and Motor Association (MCMA) – the most trusted resource for motion control information, education, and events – has transformed into the Association for Advancing Automation.
Discover how Motion Control & Motor Association can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteMotion Control & Motor Association 
The Motion Control and Motor Association (MCMA) – the most trusted resource for motion control information, education, and events – has transformed into the Association for Advancing Automation.
Introduction to PowerFlex VFDs
Join us for this comprehensive review of the PowerFlex Drive Portfolio and how PowerFlex Drives can address challenges you face today. You will learn how to configure drive parameters and monitor drive diagnostics in this interactive session.
Let's Talk about Mechatronics
Do you want to learn how the McNaughton-McKay Drives Motion & Mechanical team can help you optimize your mechanical systems? During this session we will cover best practices when selecting components for a system and common pitfalls to avoid. After learning how to optimize your system there will be a demonstration of the Rockwell Automation sizing tool Motion Analyze