Industry Insights
Optimizing Robot Cycle Time: When Every Fraction of a Second Costs
With their inherent speed, repeatability and accuracy, robots are undisputedly efficient. But that doesn’t mean they are without waste if not properly implemented.
When fractions of a second not only count, they cost, cycle time optimization is vital to the bottom line. It also plays a critical role in lean manufacturing by increasing productivity, reducing waste and boosting overall profitability.
Plan Now or Pay Later
Adil Shafi is President of ADVENOVATION Inc., a systems integrator in Rochester Hills, Michigan. He says cycle time is one of the most important financial justifications in the business case for robotics implementation.
“Every fraction of a second that something can be made faster translates directly into dollars,” says Shafi. “Time is money.”
He also contends that optimizing cycle time should be a preemptive measure. “Cycle time is done well by design, not after the fact,” says Shafi. “You have to be proactive.”
Selecting the right robot, strategically laying out the cell, optimizing robot movements and end-of-arm tooling design, and using the latest simulation techniques all provide a tactical advantage.
Choose Your Robot Wisely
Shafi says robot selection is critical. Bigger is not always better. While an ill-advised small payload robot  may end up costing more in the end.
may end up costing more in the end.
“If a robot is struggling to pick up a part because it doesn’t have enough strength or if it’s oscillating when you’re trying to place a part at high speed, the process will suffer,” says Shafi. “On the other hand, you don’t want to buy a robot that is so big and strong that you’re spending time trying to overcome inertia when accelerating, or wasting time trying to settle it when it’s moving at high speed.”
On scale with payload capacity is selecting the right type of robot for the mission. In broad terms, Shafi recommends the following: “If it’s a tabletop pick and place application, then a SCARA is the right way to go. If the reach or tooling issues are such that a SCARA robot can’t do it, then an articulated arm may be appropriate. If you’re dealing with a flat conveyor tracking application, then maybe a spider (delta-style or parallel-link) robot makes sense.”
He adds, “The geometry of the application drives the choice of the robot.”
Shafi cites standard cycle time as a point of reference. ‘Standard cycle time’ is the time it takes for the robot arm to travel up 1 inch, go across 1 foot, travel down 1 inch, and come back through the same path.
“It was a big deal in the ‘80s and early ‘90s when robots could do that in under one second,” says Shafi. “Now, it’s quite commonplace.” He notes that some delta robots can achieve up to 500 standard cycles per minute. “You can’t even see the robot, it’s going so fast.”
“It’s important to minimize the Z height differentials between pick and place points, so that the robots don’t spend extra time traveling,” adds Shafi.
Location, Location
Once the type of robot is selected, its location in relation to other equipment and the workpiece is important. Cell layout plays a significant role in cycle time optimization.
“The major factor affecting cycle time is really in the initial concept, the layout of a cell,” says Ron Potter, Director of Robotics Technology at Factory Automation Systems Inc., an RIA Certified Robot Integrator based in Atlanta, Georgia. “You’ve got to think about the layout of the machines and the equipment around the robot, to minimize motions that take up cycle time.”
The sequence of operations must be considered to ensure that conveyor systems, machine tools and other peripheral equipment are placed in optimal proximity to the robot. Evaluate different mounting configurations for the robot, such as a wall, shelf or ceiling mount. Also consider the flow of parts into and out of the robotic work cell.
“Each project has its own obstacles for cycle time optimization,” says Paul Carrier, Operations Manager at KC Robotics Inc., a robot integrator in West Chester, Ohio. “A lot of it comes down to the actual design of the system. How you’re getting product in, product out, and the interface between the upstream and downstream processes. Simulation software has been a huge advancement in cycle time optimization.”
Simulation
Most industry experts agree that simulation software has been the single, most influential advancement in cycle time optimization in the last few years. Robotic simulation has graduated from the halls of academia and research, gone above and beyond its role as a demonstration tool, and established itself on the factory floor as a true manufacturing tool.
“It’s not just an artificial set of motions presented graphically on a screen,” says Shafi. “Simulation now takes into consideration the actual mechanical characteristics of the robot and actual mechanical inertia, speed, reach and payload capacity.”
“What you can expect from simulation is very close to actual performance, within less than five percentage points when you run the system,” says Shafi. “Because robots are not exactly symmetrical and they have nonlinear inertial characteristics, moving the robot even an inch or two in either direction can give you better cycle time.”
He adds, “Simulation studies will prescribe and recommend the best location for the robot relative to a feeder, conveyor or some other delivery system in order to get the best cycle time.”
“Where cycle time and also interference, layouts and collision detection are concerns, we use simulation,” says Factory Automation’s Potter. “You see things that perhaps you wouldn’t think of by just looking at a 2D or 3D layout of a cell. You find ways to avoid singularities.”
“Up until several years ago when manufacturers started offering different simulation tools to aid in cycle time optimization, it came down to having an expert robot programmer to be able to evaluate an application to get rid of unnecessary robot motions,” says Alex Bonaire, Robotics Product Manager for Mitsubishi Electric Automation in Vernon Hills, Illinois.
“Some would argue even to this day that a well-trained eye and somebody with experience can do better than some of the simulation tools that are out there,” says Bonaire. “But every year they are getting better and better.”
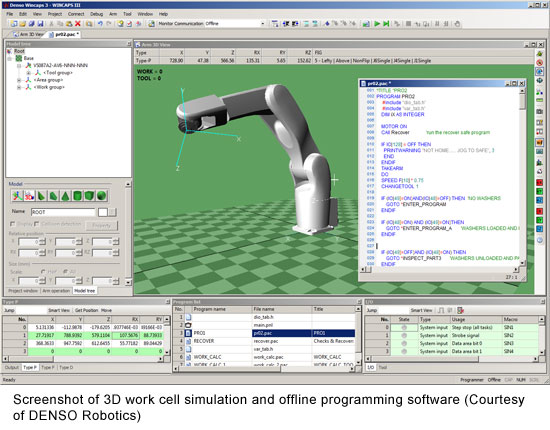
“Robot simulation is a visual tool to help the user see where and how the robot is moving based on current instructions and robot parameters,” says Patrick Laughter, Manager of Robotics Engineering, Repair & Training at DENSO Robotics in Long Beach, California. “By modifying these instructions and parameters, the user can determine how best to reduce cycle time while maintaining the integrity of the operation.”
This video courtesy of DENSO Robotics shows how simulation software is used to adjust parameters to determine optimal cycle time.
Speed & Acceleration, a Delicate Balance
Speed and acceleration settings in robot motions have to carefully optimized. Robot programming must strike a delicate balance between speed, acceleration and deceleration.
“Robots have to move fast and smoothly in their environment, like a shark moves through water,” explains ADVENOVATION’s Shafi, “and they have to do it without jerking, oscillating or vibrating when they get to certain points.”
In general, it’s recommended to set path accuracy and settling time parameters as loose as possible. Only use tight tolerances for pick and place motions where precision is critical.
“The important thing is to fly through the air very quickly and loosely, but when you’re actually picking or placing, that’s when you want to get a little slow and grasp precisely without shaking the robot,” says Shafi.
“A lot of companies use two types of speeds: program and monitor speeds,” explains Shafi. “Program speeds are when a robot is custom-tuned to move each motion to some specific speed. Monitor speed lets you raise or lower the speed of the entire application by a percentage while still keeping the proportional ratios of individual speeds. It’s a very powerful tool to have those two types of speeds.”
“When we have to optimize the cycle time, we can make the robot go as fast as it can go,” explains KC Robotics’ Carrier. “But if we’re sitting there waiting for another process to happen, like a pallet to load or an empty pallet to move in, it makes more sense for us to slow down and save wear and tear on the robot.”
DENSO’s Patrick Laughter says cycle time optimization involves looking at robot motion, I/O and program execution. He notes that it’s important to reduce the distance between robot moves, as well as the number of positions required to achieve a specific task.
“Acceleration and deceleration between moves is what eats up cycle time,” he says. “If I have three moves and I have to accelerate and decelerate through each of those moves, can I do it in one move?”
He also recommends creating ‘pass motion’ moves between the start and ending positions. “This type of move does not accelerate or decelerate between positions. It creates a smooth motion.”
DENSO provides several tools for its programming language to help reduce motion time and increase program execution time. Patrick Laughter says, “The pass motion argument added to a motion statement  can reduce the move time between positions by as much as 200 percent.”
can reduce the move time between positions by as much as 200 percent.”
His recommendations also include reducing the number of call or subroutines in a program to speed up program execution time. “If the application is calculation intensive, this can be a significant reduction to the overall cycle time.”
He also raises important considerations regarding joint speed and suggests limiting the number of moves for slower joints. “If you have a bunch of rotations around J6, can I reduce those? Can I build end-of-arm tooling that allows me to limit the movement around J6? This axis has the smallest motors and has the most weight on it. Can I reduce the payload?”
End Effector Design
End-of-arm tooling also plays a pivotal role in cycle time optimization. ADVENOVATION’s Shafi recommends keeping gripper weights low.
“You want lightweight materials like graphite or aluminum rather than bulky steel,” says Shafi. “The heavier you make the robot end effector, the slower it’s going to go.”
It’s also important to keep rotating end effectors as compact as possible to reduce rotational inertia. Keep large or heavy equipment, such as valves or vacuum generators, as close as possible to the center of  rotation to reduce inertia, or mount them to the robot arm instead.
rotation to reduce inertia, or mount them to the robot arm instead.
End-of-arm tooling (EOAT) with multiple grippers will dramatically improve throughput. “A fancy gripper more than pays for itself in cycle time savings,” says Shafi.
Factory Automation Systems has integrated many robotic cells that take advantage of “fancy” grippers to significantly impact cycle time. Potter describes one such application using multiple grippers on the robot.
“We installed more than a dozen of these systems in plants throughout the country for a major supplier of bottled water. The systems have played a major role in overall cycle time optimization.”
“Two robots work together,” explains Potter. “The first robot unloads empty 5-gallon water bottles from racks and places them onto a conveyor for the cleaning and refilling operation. A second robot picks up 10 bottles at a time from the fill-line conveyor and loads them into shipping racks. Each 5-gallon bottle weighs 50 pounds when full, so that’s 500 pounds of water per cycle. The robot performs this rack loading operation in 10 seconds.”
“Multiple tools allow the robot to perform the work of 10 operators and also eliminates the ergonomic concerns of manual operations,” adds Potter.
 While awe-inspiring EOATs might garner all the fanfare, other developments behind the frontlines are impacting cycle time optimization as well.
While awe-inspiring EOATs might garner all the fanfare, other developments behind the frontlines are impacting cycle time optimization as well.
Integrated Controls
Recent advancements in integrated controls are speeding up cycle time by enabling high-speed communication and seamless connectivity.
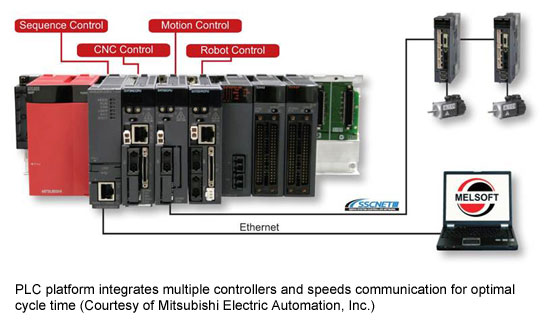
Bonaire explains: “Mitsubishi’s iQ PLC platform allows seamless integration of various components (robot, PLC, CNC, I/O, motion, including non-robot and extended or external robot axes) and enables the entire system to operate as a single machine. This eliminates the communication lag time and handshakes required by machines that are connected via traditional means.”
“By eliminating the communication lag, cycle time can be improved,” says Bonaire.
This video courtesy of Mitsubishi Electric shows the platform’s ability to combine PLC, motion, robot and CNC controllers along with enterprise connectivity into a single control architecture.
Combining Operations
Factory Automation’s Potter says a key element in optimizing cycle time is reducing work-in-process inventory. He says work-in-process inventory represents no real value being added to the part when it’s sitting in a bin and being transferred from one operation to another.
He cites an example: “One of our customers is now making parts with a robotic system in 3 hours that previously took them 8 hours before they combined upstream and downstream operations. The robot not only loads and unloads machine tools, but once it removes the part from the machine, the robot deburrs it. This used to be done manually by putting parts in a bin, transporting them to another department, and picking them up again for processing.”
“We try to eliminate the number of human touches,” says Potter. “That’s a key element in optimizing cycle time.”
“Another aspect of cycle time optimization is changeover,” explains Potter. “When you have a variety of parts, or a family of parts, that are processed in batch runs, changeover time is important. We try to minimize the amount of time it takes to re-adapt the robot from one part to another in an operation. That’s also something that has to be done upfront (in the planning stage).”
Milliseconds Add Up
While there’s a strategic advantage to carefully planning out the robotic work cell to optimize cycle time from the outset, many of these tips and techniques can be implemented once a cell is up and running. This is especially true with the use of offline programming. Each measure may only shave a fraction of a second, but those milliseconds add up over days, months, even years.
“That’s why people spend money on cycle time optimization, even with existing systems,” says Shafi. “If they can eke out more throughput per unit time, that’s substantial.”
Substantial, indeed. Milliseconds that add up to significant time savings, better throughput and higher profits. For more ways to speed up your cells, check out Adil Shafi’s free webinar on cycle time optimization airing on December 12.
RIA Members featured in this article:
ADVENOVATION, Inc.
DENSO Robotics
Factory Automation Systems, Inc.
KC Robotics, Inc.
Mitsubishi Electric Automation, Inc.
Robotic Industries Association
RIA has transformed into the Association for Advancing Automation, the leading global automation trade association of the robotics, machine vision, motion control, and industrial AI industries.
Discover how Robotic Industries Association can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteRobotic Industries Association 
RIA has transformed into the Association for Advancing Automation, the leading global automation trade association of the robotics, machine vision, motion control, and industrial AI industries.

FASTSUITE and Kawasaki Robotics - The Perfect Fit
One platform. Endless possibilities. Kawasaki Robotics is your

HIROTEC implements Digital Twin with FASTSUITE Edition 2
HIROTEC introduces CENIT's FASTSUITE Edition 2 as digital factory solution at its Japanese headquarters