Case Studies
Automated tire depalletizing
Partner:
AROTEC Automation und Robotik GmbH
Challenge:
Unloading or depalletizing tires from a load carrier is a physically demanding activity for humans. The customer – a specialist for complete wheel assemblies – was therefore looking for an automation solution that would solve this challenge. AROTEC came up with a unique solution – a robotic tire depalletizer.
Solution:
AROTEC developed a unique automation solution for robotic tire depalletizing – TireDepal.
The robotic tire depalletizer consists of one industrial robot equipped with a specialized end-of-arm tool, a 3D measuring unit, a roller conveyor, and a special folding station for the side-walls of the load carrier.
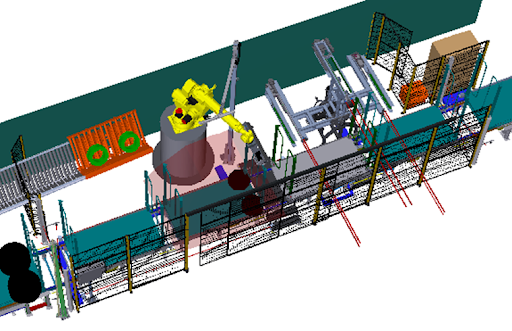
Picture: Final plant installation
The carrier, loaded with tires in a chain or horizontal pattern formation, is provided by a forklift truck to the infeed point of the conveyor system. There, the load carrier is identified (by reading a barcode) and conveyed into the robotic cell. As soon as the loaded carrier reaches the depalletizing place, it is detected/captured for the first time by the Photoneo PhoXi 3D vision sensor, model XL.
Based on the sensor data, AROTEC’s software DEPALGO@Tire determines the exact pose of all tires in the upper layer. Subsequently, the software searches for two adjacent tires whose poses are within certain tolerances. DEPALGO@Tire then calculates a collision-free robot trajectory and sends it to the robot controller. As a result, two tires are picked per robot cycle and placed on a tire outfeed conveyor. Thanks to this feature, the automation solution achieves a throughput of up to 720 tires per hour. As soon as the robot is outside the depalletizing zone, a new image acquisition is triggered, and the sequence described above is repeated.
Once the last tire has been unloaded from the carrier, it is conveyed to the folding station – another special feature of AROTEC’s automation solution. There, the opposite side walls of the load carrier are automatically folded in – and this for different carrier types with one- and two-piece side walls.
Get the Training You Need for a Safer Workplace!
Autonomous mobile robots are one of the fastest-growing segments of the robotics industry. During this live virtual training, you'll be introduced to safety protocols and best practices for working with mobile robots in industrial settings.
Learn more and register now for upcoming training dates.
The empty and folded load carrier is conveyed out from the robotic system and can be picked up by a forklift truck. According to AROTEC, they are not aware of any similar automation solution that achieves tire depalletizing with the flexibility and performance of AROTEC’s TireDepal solution.
This is possible thanks to the Photoneo 3D vision sensor, the flexible end effector/end-of-arm tool, and the folding station, which can process different carrier types.
AROTEC innovative robotic solution TireDepal can depalletize tires from 14″-24″ in a double- grip from all common carriers. The exact position of the tires is precisely determined by the Photoneo PhoXi 3D Scanner XL.
Discussion:
The PhoXi 3D Scanner XL is one of a few 3D vision sensors available on the market with such a large detection range. The sensor copes well with black tires. In addition, the price-performance ratio of the scanner is very good.
The capturing of the load carriers: Based on the point cloud/sensor data, AROTEC’s proprietary object recognition software DEPALGO@Tire can precisely locate tires in any orientation within the carrier (from vertical to horizontal).
To their knowledge, this automation solution is the world’s first system that allows a robot to fully automatically destack/depalletize all common tire carriers without any setup.
After all tires have been depalletized, the side walls of the carrier are folded in so that a compact unit can be picked up by a forklift.
The robotic solution improves ergonomics and ensures cost-reduction.

Picture: A pilot setup at the customer’s site
Would you like to discuss your project with Photoneo? Contact them here.
Zebra Technologies Slovakia s.r.o.
Photoneo is a leading provider of robotic vision and intelligence. Based on a patented 3D technology, Photoneo developed the world’s highest-resolution and highest-accuracy 3D camera, thus unlocking the full potential of powerful, reliable, and fast machine learning.
Discover how Zebra Technologies Slovakia s.r.o. can support your automation journey with their complete range of solutions and expertise.
Visit Company WebsiteZebra Technologies Slovakia s.r.o. 
Photoneo is a leading provider of robotic vision and intelligence. Based on a patented 3D technology, Photoneo developed the world’s highest-resolution and highest-accuracy 3D camera, thus unlocking the full potential of powerful, reliable, and fast machine learning.
Precise Localization Ensures Robust Lab Automation Operations
Precise localization delivered by robot vision solution enables robust pick-and-place operations in lab automation.
Craig Salvalaggio elected to RIA Board of Directors
During the Robotic Industry Associate’s (RIA) search for members to join the Board of Directors, the distinguished organization selected Applied
TT 300-A Series Introduction
See how the NexAIoT TT-300 intelligent AI computing system boosts industrial automation efficiency and enables smart factory solutions